cnc용 프로그램 개발 수치제어가 가능한 공작기계용 제어 프로그램 개발
기계에서 제품을 처리하는 순서에 대한 정보가 프레임 단위로 입력됩니다. FRAME은(는) 일부입니다. 제어 프로그램, 단일 단위로 입력 및 처리되며 하나 이상의 명령을 포함합니다.
각 프레임에서 이전 프레임과 관련하여 변경되는 프로그램 부분만 기록됩니다.
프레임은 뒤에 오는 데이터의 목적을 정의하는 단어로 구성됩니다.
예를 들어:
N3 - 프레임의 시퀀스 번호
G02 - 준비 기능
(G01 - 한 점까지 직선으로 이동
G02,G03 - 원형 보간 시계 방향 또는 반시계 방향)
X - 축을 따라 이동의 끝점 좌표, Y - (예: X + 037540(375.4mm)
원호 보간에서의 호 중심 좌표
F4 - 피드 코드(예: F0060(60mm/min)) S2 - 스핀들 속도 코드 T2 - 공구 번호
M2 - 보조 기능(공구 교환, 테이블 교환, 냉각 스위치 켜기, 공작물 클램핑...).
L3 - 기하학적 정보 수정을 입력하고 취소합니다.
LF - 프레임 끝.
기계의 작업 몸체를 이동하는 프로그램을 만들려면 특정 좌표계를 연결해야 합니다. Z 축은 기계의 메인 스핀들의 축과 평행하게 선택되며 X 축은 항상 수평입니다. 프로그램을 컴파일할 때 영점, 초기점 및 고정점의 개념이 사용됩니다.
제어 프로그램 준비에는 다음이 포함됩니다.
1. 부품 도면 분석 및 공작물 선택.
4. 부품의 좌표계와 도구의 시작점 선택.
5. 공작물을 기계에 고정하는 방법 선택.
기준점 설정, 도구의 움직임 구축 및 계산.
정보 인코딩
프로그램 캐리어에 프로그램 쓰기, 편집 및 디버깅.
CNC 기계의 사용은 생산 환경에서 사람을 사용하는 문제를 상당히 악화시켰습니다. 모든 일을
 자동 모드에서 공작 기계로 부품을 제조하는 작업은 사람에게 공작물을 설치 및 제거하는 가장 어렵고 비창조적인 작업을 남겼습니다. 따라서 CNC 공작 기계의 개발과 동시에 "MANUAL"노력이 필요한 특정 작업을 수행 할 때 사람을 대체 할 수있는 시스템을 만드는 작업이 진행되었습니다.
자동 모드에서 공작 기계로 부품을 제조하는 작업은 사람에게 공작물을 설치 및 제거하는 가장 어렵고 비창조적인 작업을 남겼습니다. 따라서 CNC 공작 기계의 개발과 동시에 "MANUAL"노력이 필요한 특정 작업을 수행 할 때 사람을 대체 할 수있는 시스템을 만드는 작업이 진행되었습니다.
수치가 있는 밀링 머신 및 다중 작업 머신(머시닝 센터) 프로그램 관리
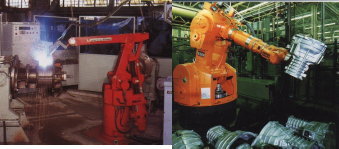
3.3 산업용 로봇
산업용 로봇(IR)은 프로그램 제어가 가능한 기계식 조작기입니다.
매니퓰레이터는 인간 손의 동작을 모방하거나 생산 대상으로 대체하는 기계 장치입니다.
산업용 로봇은 기술(변화
개체의 속성) 및 전송.
기술 로봇은 용접을 수행하고 운송 로봇은 공작물을 처리 영역으로 옮깁니다.
운반 능력에 따라 다음과 같이 나뉩니다.
 물체 중량 초경량 최대 1kg 경량 1-10kg 중형 10-100kg 중량물 100-1000kg 초중량 1000kg 이상
물체 중량 초경량 최대 1kg 경량 1-10kg 중형 10-100kg 중량물 100-1000kg 초중량 1000kg 이상

초경량 로봇이 장치를 조립하고 무거운 로봇이 대형 공작물을 이동합니다.
PR은 또한 CNC 시스템(닫힘 및 열림, 윤곽 및 위치, CNC, DNC, HNC)에 따라 작업 본체의 자유도 수에 따라 세분화됩니다.
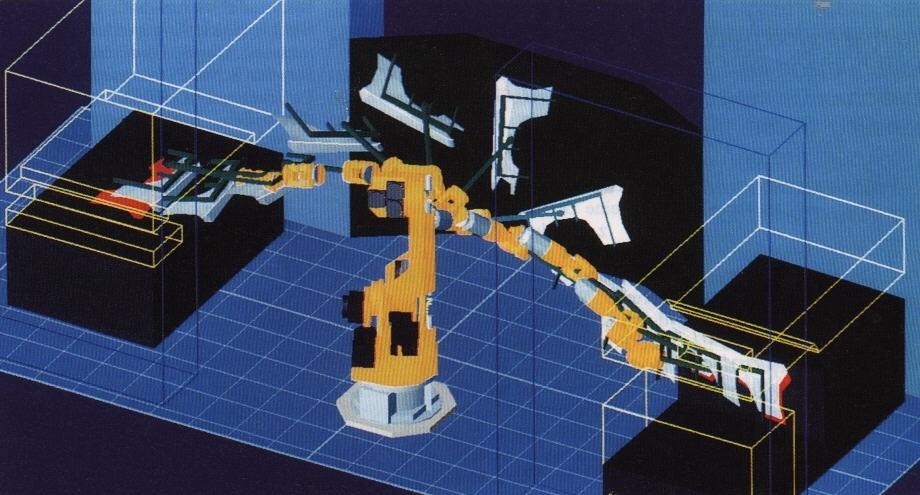
운송 로봇의 서비스 영역과 공작물의 이동 궤적
현재 폭넓은 사용기술 장비를 적재하고 창고에서 블랭크를 배달하며 부품을 창고로 운반하는 운송 로봇을 받았습니다. 스탬핑 작업 생산에서 운송 로봇은 스탬프에 블랭크를 공급하고 제거합니다.
차체를 용접하고 도장하는 로봇이 널리 사용되었습니다. 로봇은 전자 장비, 시계 및 기타 장치의 조립에 사용됩니다.
CNC 시스템이 있는 기술 장비와 함께 산업용 로봇은 복잡한 생산 자동화의 기반을 형성합니다.
로봇은 차체를 용접하고 설치합니다. 나무 패널가공 기계에 (로봇 응용의 예)
![]()
테스트 질문:
1. 선반에서 구면을 처리할 수 있는 CNC 시스템은 무엇입니까?
2. 드릴링 머신에는 어떤 CNC 시스템을 사용해야 합니까?
3. 선반에서 공작물을 가공할 때 몇 좌표까지 보간이 가능합니까? - 밀링 머신에서?
4. 주기적 프로그램 제어 시스템과 CNC 시스템의 차이점은 무엇입니까?
5. 산업용 로봇은 어떤 기능을 수행합니까?
테스트 제어 카드의 샘플 질문입니다.
어떤 작업에서 윤곽 제어가 있는 CNC 시스템을 사용하는 것이 좋습니까?
하지만). 계단식 롤러를 돌릴 때.
나) . 이중 곡률의 표면을 밀링할 때.
에). 인쇄 회로 기판의 구멍을 가공할 때.
복잡한 모양의 부품을 페인팅하는 데 어떤 유형의 로봇이 사용됩니까? 하지만). 윤곽 제어 기술.
비). 위치 제어 기능이 있는 대형.
에). 윤곽 제어로 운송합니다.
일반적으로 금전적인 측면에서 평가해야 할 것은 UE가 아니라 생산에 도입된 기술이라고 생각합니다. NC를 얻는 데 몇 초가 걸리고 CAM에서 처리 전략을 설정하는 것도 길지 않지만 작업 분석에 가장 많은 시간을 할애합니다. USP 어셈블리), 절단 모드 선택, 제도 노선지도(및 다른 생산 현장과의 조정) 또는 기존 경로 지도 분석, 설정 지도 작성, 고객과의 결과 조정, 기계 시간/공구 비용/공구 수명/최종 결과에 대한 희망을 고려하여 "아래에서 기계". 여기서, 이들(및 다른 많은 요인들)에 따라 CAM에서 적절한 전략이 선택되고 해당 UE가 획득됩니다. 또한 생산 과정에서 발생할 수 있는 변경 가능성을 잊지 마십시오. 또한 장비와 값 비싼 도구, 공작물 등의 타이밍과 무결성에 대한 책임을 잊지 마십시오.질문이 생겼습니다. 특정 부품을 처리하기 위해 작성된 프로그램의 적절한 가격은 얼마입니까? 나는 인터넷에서 검색했습니다-많은 제안이 있지만 가격은 발표되지 않았습니다. 누군가 나에게 가격을 말해 줄 수 있다면 부품의 복잡성이나 작업을 평가하는 기준에 따라 가격을 정하는 것이 좋을 것입니다. 당신이 기계를 다루어야 하는 것도 가능하며, 그런 다음 운전자를 교육해야 합니다. 이에 대해 어떤 가격을 요구해야 합니까? 말해봐, 나도 나 자신을 몰라. =\
추신 주제의 제목을 수정하십시오. 그렇지 않으면 내가 직접 찾을 수 없습니다 =\
개인적으로 원격근무의 경우 대략 다음과 같은 원칙에 따라 고객과 소통한다고 자신합니다. 작업 완료 예상 시간을 기준으로 합니다. 2를 곱합니다(고객 측의 예상치 못한 상황을 고려하여). 나는 받은 시간에 $100/day를 곱합니다. 나는 복잡성 요소를 곱합니다(나는 작업의 복잡성, 공작물, 도구 등의 가격은 물론 고객이 내 작업에서 얻는 이점을 고려합니다). 나는 고객과의 관계의 특성을 고려합니다(고객이 신뢰할 수 있고 입증된 경우 할인을 제공합니다). 나는 일반적으로 작업 수행 기간에 2를 더 곱합니다(이것은 내 측에서 예측하지 못한 상황에 대한 기간이기 때문에 지불되지 않음). 나는 고객에게 금액과 조건을 알리고, 이 금액에 어떤 서비스가 포함되는지도 충분히 설명합니다(오해를 방지하기 위해).
등록금 문제에 대해: 해당 서비스를 제공하는 사무실, 매주 기본 코스약 30k.r. 사람에게서. 이 금액에서 안내합니다.
CNC 시스템을 생산하는 회사는 ISO 표준을 준수하지만 종종 편차를 허용합니다. 이것은 다중 매개 변수 기술 명령(예: 도구 변경) 구현에서 마이크로컴퓨터의 "약점" 때문입니다. 따라서 특정 CNC 시스템에 대한 프로그램을 컴파일할 때 프로그래밍 기계에 대한 문서 세트에 포함된 "사용 설명서"에 중점을 둘 필요가 있습니다.
ISO-7비트 코드는 문자를 7비트 이진수로 정의합니다. 이 문자의 비트를 정의하는 천공된 테이프의 구멍 수가 홀수인 경우 DPD(데이터 준비 장치)는 패리티 비트인 8번째 트랙의 구멍으로 이 문자의 인코딩을 자동으로 보완합니다. EIA 코드(미국, 일본)의 경우 8번째 트랙은 홀수 홀의 컨트롤입니다.
UE에서 이동은 좌표축 X, Y, Z에 의해 정의되거나 각각 A, B, C를 중심으로 하는 회전(예: 기계 테이블의 회전)으로 정의됩니다. 편지 U, V, W는 각각 X, Y 및 Z 축에 평행한 보조 이동 기능을 정의합니다.
UE는 프레임이라고 하는 일련의 번호가 매겨진 문장입니다. 프레임 번호는 프레임을 편집하거나 이 프레임에서 NC를 시작하기 위해 필요한 프레임을 찾을 수 있는 레이블입니다. UE를 구성할 때 프로그램의 이전 부분과 관련하여 변경되는 정보만 프레임에 기록됩니다.
프레임은 단어로 구성됩니다. 각 단어에는 주소(라틴 문자 중 하나)와 십진수가 있습니다. 10진수단어 형식에 따라 단어로 작성됩니다. 에 현대 시스템숫자는 일반적으로 소수점으로 작성되지만 특정 기계에 대한 사용자 지침에 따라 숫자 형식을 명확히 해야 합니다(CNC RAM에 저장된 매개변수에 의해 단어 형식이 결정되는 CNC 시스템이 있음).
블록의 끝에 LF 문자(캐리지 리턴)가 기록됩니다. 예: N10 G90 X10,2 Z-100(LF) 10번 블록에서 좌표(10.2, -100)가 있는 점까지의 이동은 절대 참조 시스템(G90)에서 정의됩니다. LF 문자는 천공된 테이프에서만 볼 수 있으며 디스플레이에서는 보이지 않습니다. 또한 UE 목록에 첨부되지 않습니다.
NC 블록의 단어는 순서에 관계없이 입력할 수 있으며 CNC는 먼저 기술 기능 S, F, T, M의 명령을 처리한 다음 치수 이동의 수행과 함께 준비 G를 처리합니다.
모듈로 UE 제어.
앞서 언급했듯이 ISO-7비트 코드는 문자를 인코딩할 때 가정합니다. 우수천공 테이프의 구멍. 문자 코드를 이진수로 간주하면 ISO 표준에 따라 짝수 개의 1을 포함해야 합니다. 이 속성은 단일 오류(1비트 또는 1비트 추가 손실)에 대한 검사를 보장합니다. 따라서 일부 시스템에서는 더 많은 안정적인 외관모듈로 제어.
데이터 준비 장치(PDD)는 UE 프레임을 기록할 때 각 프레임에 대한 체크섬을 자동으로 계산하고 10으로 나누어 나머지 덧셈(mod)을 10의 배수로 결정합니다. 이 덧셈은 체크섬(0... .9) 프레임 및 UPD는 "프레임 끝"(LF) 문자 뒤에 자동으로 기록됩니다. CNC는 NC 블록을 읽을 때 각 블록의 패딩도 계산하여 프로그램 매체의 패딩과 비교합니다. 이 값이 일치하지 않으면 프로그램 매체에 오류 메시지가 표시됩니다. 체크섬은 "프레임 끝"(LF) 문자를 포함한 모든 문자의 숫자 코드 합계와 같습니다. 문자 코드는 이진수입니다(예: 코드 N 1001110| 2=78| 십
CNC 기계용 NC 조각
준비 기능 G
주의: NC 명령 기능은 특정 CNC 모델에 대해 제공되는 것이 아니라 코스 및 과정에서 프로그램을 개발하기 위한 일반화된 형식입니다. 졸업 디자인. 준비 기능이라고 하는 주소 G가 있는 기능은 CNC 기계의 모드와 작동 조건을 결정합니다. G00 ~ G99로 코드화됩니다. 4
G00 포지셔닝. 급이송으로 프로그램된 지점으로 이동합니다.
G01 선형 보간. 고속 이송으로 직선 이동.
G02 시계 방향 원호 보간 운동 평면에 수직인 축의 양의 방향에서 볼 때 시계 방향으로 원호를 따라 이동합니다.
G03 반시계 방향 원호 보간 운동 평면에 수직인 축의 양의 방향에서 볼 때 반시계 방향 원호를 따라 이동합니다.
G04 일시 중지. NC의 실행 시간 지연을 초기화합니다.
G17 G18 G19 원호 보간 평면 선택. 원운동 및 커터 직경 보정을 프로그래밍할 때 평면 XY - G17, XZ - G18, YZ - G19를 지정합니다.
G25 프로그램 반복 NC 블록 그룹의 다중 반복.
G41 G42 커터 직경 보정 좌우. 가공 중인 윤곽을 기준으로 커터 중심의 공구 경로를 이동하는 데 사용됩니다.
G60 정밀 위치 결정 급이송으로 이동하여 한 방향에서 위치에 접근합니다.
G81 … G89 고정 사이클. 일반적인 부품 표면의 움직임이 프로그래밍됩니다.
G80 고정 사이클 취소. 고정 사이클 취소
G81 G89 G90 절대 치수. 절대 참조 시스템의 좌표 프로그래밍.
G91 증분 크기. 상대 참조 시스템에서 좌표 프로그래밍.
G92 좌표계 설정. 기계 작업 본체의 지정된 위치를 기준으로 좌표계의 원점을 결정합니다.
G94 G95 이송값 단위 결정
G94 - mm/min
G95 - mm/rev G96 일정한 절삭 속도. 일정한 절삭 속도로 프로그래밍 처리.
G98 G99 고정 사이클의 속성을 정의합니다. G81 89 실행 후 리턴 포인트 설정
보조 기능 M
M00 기술 정지. 명령을 실행한 후 프로그램이 중지됩니다. 작업 계속 - "시작" 키 누르기.
M01 확인과 함께 정지. M01 명령은 제어판의 해당 키를 누르면 실행됩니다.
M02 M30 프로그램 종료. 프로그램 블록 끝. 이 UE의 처리를 완료하기 위한 명령입니다. 프로그램 캐리어(자기 테이프, 천공 테이프)에 여러 프로그램이 있을 수 있습니다. 이 명령은 실제로 "테이프 끝"을 의미합니다.
M03 M04 스핀들 회전. 스핀들 회전 방향은 시계 방향입니다. 스핀들 회전 방향은 시계 반대 방향입니다.
M05 스핀들 정지 스핀들을 정지시키고 냉각을 끕니다. M06 공구 교환. 작업 위치에 도구를 배치하고 그 수는 주소 T에 의해 결정됩니다.
M08 M09 냉각수 공급. 냉각을 켭니다. 냉각을 끕니다.
M19 방향 스핀들 정지. 스핀들이 지정된 각도 위치에서 정지하도록 합니다.
M17 서브루틴의 끝. M20 외부 장치와의 통신. 산업용 로봇에 대한 제어권을 설정하고, 운송 및 저장 장치의 작동을 초기화하는 등의 작업을 수행할 수 있습니다.
M41 M42 M43 스핀들 속도 범위. 스핀들 속도 범위 번호를 설정합니다.
"절대 기준 시스템 - G90", 이송 값의 치수(G94, G95), 직경 보정(G40) 등과 같은 여러 기능은 기계 작동을 준비할 때 자동으로 설정됩니다( 전원을 켭니다). 이를 "기본 기능"이라고 하며 초기 상태는 "사용자 지침"에 지정되어 있습니다.
주소 F에서 이송 값이 프로그래밍되고 S는 스핀들 속도 값입니다. 주소 문자 H는 길이의 교정기 번호를 결정하고 D는 지름을 결정합니다.





