A lineáris egyenletrendszert együttesnek nevezzük, ha mti. Hogyan találhatunk általános és sajátos megoldást egy lineáris egyenletrendszerre
Továbbra is lineáris egyenletrendszerekkel foglalkozunk. Eddig olyan rendszerekkel foglalkoztunk, amelyek egyedi megoldással rendelkeznek. Az ilyen rendszerek bármilyen módon megoldhatók: helyettesítési módszer("iskola") Cramer-képletekkel, mátrix módszerrel, Gauss módszer. A gyakorlatban azonban elterjedt még két eset, amikor:
1) a rendszer inkonzisztens (nincs megoldása);
2) a rendszernek végtelen sok megoldása van.
Ezeknél a rendszereknél a leguniverzálisabb megoldási módszereket alkalmazzák - Gauss módszer. Valójában az „iskolai” út is elvezet a válaszhoz, de be felsőbb matematika Szokásos a Gauss-módszert használni az ismeretlenek egymást követő eliminálására. Aki nem ismeri a Gauss-módszer algoritmust, kérem, először tanulmányozza át a leckét Gauss módszer
Maguk az elemi mátrixtranszformációk pontosan ugyanazok, a különbség a megoldás végén lesz. Először nézzünk meg néhány példát, ahol a rendszernek nincs megoldása (inkonzisztens).
1. példa
Mi az, ami azonnal megakad ebben a rendszerben? Az egyenletek száma kevesebb, mint a változók száma. Van egy tétel, ami azt mondja: „Ha a rendszerben lévő egyenletek száma kisebb mennyiségben változók, akkor a rendszer vagy inkonzisztens, vagy végtelen sok megoldása van.És már csak ki kell deríteni.
A megoldás eleje teljesen hétköznapi - felírjuk a rendszer kiterjesztett mátrixát, és elemi transzformációkkal lépésenkénti formába hozzuk:

(egy). A bal felső lépésben (+1) vagy (-1) kell kapnunk. Az első oszlopban nincsenek ilyen számok, így a sorok átrendezése nem fog működni. Az egységet önállóan kell megszervezni, és ez többféleképpen is megtehető. Így tettünk. Az első sorhoz hozzáadjuk a harmadik sort (-1) megszorozva.
(2). Most két nullát kapunk az első oszlopban. A második sorhoz adja hozzá az első sort 3-mal szorozva. A harmadik sorhoz adja hozzá az elsőt 5-tel.
(3). Az átalakítás után mindig érdemes megnézni, hogy lehet-e egyszerűsíteni a kapott karakterláncokat? Tud. A második sort elosztjuk 2-vel, ezzel egyidejűleg a második lépésben megkapjuk a kívántat (-1). Osszuk el a harmadik sort (-3-mal).
(4). Adja hozzá a második sort a harmadikhoz. Valószínűleg mindenki felfigyelt a rossz vonalra, amely az elemi átalakítások eredményeként alakult ki:
![]() . Nyilvánvaló, hogy ez nem lehet így.
. Nyilvánvaló, hogy ez nem lehet így.
Valójában átírjuk a kapott mátrixot

vissza a lineáris egyenletrendszerhez:

Ha elemi transzformációk eredményeként egy karakterlánc az alak , aholλ egy nem nulla szám, akkor a rendszer inkonzisztens (nincs megoldása).
Hogyan rögzítsük egy feladat végét? Le kell írnia a következő mondatot:
„Elemi transzformációk eredményeképpen egy olyan alakú karakterláncot kapunk, ahol λ ≠ 0 ". Válasz: "A rendszernek nincsenek megoldásai (inkonzisztens)."
Felhívjuk figyelmét, hogy ebben az esetben a Gauss-algoritmusnak nincs fordított mozgása, nincsenek megoldások, és egyszerűen nincs mit találni.
2. példa
Oldja meg a lineáris egyenletrendszert! 
Ez egy „csináld magad” példa. Komplett megoldásés a válasz a lecke végén.
Ismételten emlékeztetünk arra, hogy az Ön megoldási útvonala eltérhet a mi megoldási útvonalunktól, a Gauss-módszer nem ad egyértelmű algoritmust, az eljárást és magukat a műveleteket minden esetben magának kell kitalálnia.
Még egy műszaki jellemző megoldások: az elemi transzformációk leállíthatók azonnal, amint egy sor, mint a , hol λ ≠ 0 . Fontolgat feltételes példa: tegyük fel, hogy az első transzformáció után egy mátrixot kapunk
 .
.
Ez a mátrix még nem redukálódott lépcsős formává, de nincs szükség további elemi átalakításokra, hiszen megjelent a forma egy sora, ahol λ ≠ 0 . Azonnal azt kell válaszolni, hogy a rendszer nem kompatibilis.
Ha egy lineáris egyenletrendszernek nincs megoldása, ez szinte ajándék a tanulónak, mivel rövid megoldást kap, néha szó szerint 2-3 lépésben. De ezen a világon minden kiegyensúlyozott, és a probléma, amelyre a rendszernek végtelenül sok megoldása van, csak hosszabb.
3. példa:
Oldja meg a lineáris egyenletrendszert!

4 egyenlet és 4 ismeretlen, tehát a rendszernek vagy egyetlen megoldása lehet, vagy nincs megoldása, vagy végtelen sok megoldása lehet. Bármi is volt, de a Gauss-módszer mindenképpen elvezet bennünket a válaszhoz. Ez a sokoldalúsága.
A kezdet ismét szabványos. Felírjuk a rendszer kiterjesztett mátrixát, és elemi transzformációkkal lépésformára hozzuk:

Ez minden, és féltél.
(egy). Kérjük, vegye figyelembe, hogy az első oszlopban lévő összes szám osztható 2-vel, így a bal felső lépésben is megelégszünk egy kettessel. A második sorhoz hozzáadjuk az első sort (-4) megszorozva. A harmadik sorhoz hozzáadjuk az első sort (-2) megszorozva. A negyedik sorhoz hozzáadjuk az első sort (-1) megszorozva.
Figyelem! Sokan kísértésbe eshetnek a negyedik sorból kivonni első sor. Ezt meg lehet tenni, de nem szükséges, a tapasztalat azt mutatja, hogy a számítási hiba valószínűsége többszörösére nő. Csak összeadjuk: a negyedik sorhoz hozzáadjuk az első sort, megszorozva (-1) - pontosan!
(2). Az utolsó három sor arányos, ebből kettő törölhető. Itt ismét meg kell mutatni fokozott figyelem, de tényleg arányosak a vonalak? A viszontbiztosításhoz nem lesz felesleges a második sort (-1) megszorozni, és a negyedik sort elosztani 2-vel, ami három azonos sort eredményez. És csak ezután távolítson el kettőt. Az elemi átalakítások eredményeként a rendszer kiterjesztett mátrixa lépcsőzetes formára redukálódik:

A feladat füzetben való elkészítésekor az áttekinthetőség kedvéért célszerű ugyanezeket a jegyzeteket ceruzával elkészíteni.
Átírjuk a megfelelő egyenletrendszert: 
A rendszer „szokásos” egyetlen megoldásának itt nincs szaga. Rossz vonal hol λ ≠ 0, szintén nem. Ezért ez a harmadik fennmaradó eset – a rendszernek végtelen sok megoldása van.
A rendszer végtelen megoldási halmazát röviden az ún általános rendszermegoldás.
A rendszer általános megoldását a Gauss-módszer fordított mozgásával fogjuk megtalálni. A végtelen megoldáshalmazt tartalmazó egyenletrendszereknél új fogalmak jelennek meg: "alapváltozók"És "szabad változók". Először is határozzuk meg, milyen változóink vannak alapvető, és milyen változók - ingyenes. Nem szükséges részletesen elmagyarázni a lineáris algebra feltételeit, elég megjegyezni, hogy vannak ilyenek bázisváltozókÉs szabad változók.
Az alapváltozók mindig szigorúan a mátrix lépcsőin „ülnek”.. Ebben a példában az alapváltozók a következők x 1 és x 3 .
A szabad változók mindent tartalmaznak a maradék változók, amelyek nem kaptak lépést. A mi esetünkben kettő van: x 2 és x 4 - szabad változók.
Most kell mindenbázisváltozók Expressz csak keresztülszabad változók. A Gauss-algoritmus fordított mozgása hagyományosan alulról felfelé működik. A rendszer második egyenletéből fejezzük ki az alapváltozót x 3:
Most nézzük meg az első egyenletet: ![]() . Először behelyettesítjük a talált kifejezést:
. Először behelyettesítjük a talált kifejezést:
![]()
Marad az alapváltozó kifejezése x 1-től szabad változókon keresztül x 2 és x 4:

Az eredmény az, amire szüksége van - minden bázisváltozók ( x 1 és x 3) kifejezve csak keresztül szabad változók ( x 2 és x 4):
![]()
Valójában az általános megoldás készen áll:
![]() .
.
Hogyan írjuk le az általános megoldást? Először is, a szabad változók „önmagukban” és szigorúan a helyükre kerülnek az általános megoldásba. Ebben az esetben a szabad változók x 2 és x A 4-et a második és a negyedik pozícióba kell írni:
 .
.
Az eredményül kapott kifejezések az alapváltozókhoz ![]() és nyilván az első és a harmadik pozícióba kell írni:
és nyilván az első és a harmadik pozícióba kell írni:

A rendszer általános megoldásából végtelenül sok megtalálható privát döntések. Ez nagyon egyszerű. szabad változók x 2 és x 4 azért hívják így, mert adható bármilyen végső értéket. A legnépszerűbb értékek a nulla értékek, mivel ez a legegyszerűbb módja egy adott megoldás megszerzésének.
Behelyettesítés ( x 2 = 0; x 4 = 0) az általános megoldásba, a konkrét megoldások egyikét kapjuk:
![]() , vagy egy adott megoldás a szabad változóknak megfelelő értékekkel ( x 2 = 0; x 4 = 0).
, vagy egy adott megoldás a szabad változóknak megfelelő értékekkel ( x 2 = 0; x 4 = 0).
Az egyik egy másik édes pár, helyettesítsük ( x 2 = 1 és x 4 = 1) az általános megoldásba:
![]() , azaz a (-1; 1; 1; 1) egy másik sajátos megoldás.
, azaz a (-1; 1; 1; 1) egy másik sajátos megoldás.
Könnyen belátható, hogy az egyenletrendszer rendelkezik végtelenül sok megoldás hiszen szabad változókat adhatunk Bármiértékeket.
Minden egyes egy adott megoldásnak meg kell felelnie mindenkinek rendszeregyenlet. Ez az alapja a megoldás helyességének „gyors” ellenőrzésének. Vegyünk például egy adott megoldást (-1; 1; 1; 1), és cseréljük be az eredeti rendszerben minden egyenlet bal oldalába:
Mindennek össze kell jönnie. És minden adott megoldásnál mindennek konvergálnia kell.
Szigorúan véve egy adott megoldás verifikációja olykor csal, i.e. egy adott megoldás kielégítheti a rendszer minden egyenletét, és magát az általános megoldást valójában helytelenül találjuk meg. Ezért mindenekelőtt az általános megoldás ellenőrzése alaposabb és megbízhatóbb.
Hogyan ellenőrizhető a kapott általános megoldás ![]() ?
?
Nem nehéz, de elég hosszú átalakítást igényel. Kifejezéseket kell vennünk alapvető változók, ebben az esetben ![]() és , és cserélje be őket a rendszer minden egyenletének bal oldalára.
és , és cserélje be őket a rendszer minden egyenletének bal oldalára.
A rendszer első egyenletének bal oldalán:

Megkapjuk a rendszer eredeti első egyenletének jobb oldalát.
A rendszer második egyenletének bal oldalán:

Megkapjuk a rendszer eredeti második egyenletének jobb oldalát.
És tovább - a rendszer harmadik és negyedik egyenletének bal oldalára. Ez az ellenőrzés hosszabb, de garantálja a teljes megoldás 100%-os helyességét. Ezenkívül bizonyos feladatoknál ellenőrizni kell az általános megoldást.
4. példa:
Oldja meg a rendszert Gauss módszerrel! Keressen egy általános és két privát megoldást. Ellenőrizze az általános megoldást.

Ez egy „csináld magad” példa. Itt egyébként megint kevesebb az egyenletek száma, mint az ismeretleneké, ami azt jelenti, hogy azonnal világos, hogy a rendszer vagy inkonzisztens lesz, vagy végtelen számú megoldása lesz.
5. példa:
Oldja meg a lineáris egyenletrendszert! Ha a rendszernek végtelen sok megoldása van, keressen két konkrét megoldást, és ellenőrizze az általános megoldást

Megoldás:Írjuk fel a rendszer kiterjesztett mátrixát, és elemi transzformációk segítségével hozzuk lépcsőzetes formába:

(egy). Adja hozzá az első sort a másodikhoz. A harmadik sorhoz hozzáadjuk az első sort 2-vel szorozva. A negyedik sorhoz hozzáadjuk az első sort 3-mal szorozva.
(2). A harmadik sorhoz hozzáadjuk a második sort (-5) megszorozva. A negyedik sorhoz hozzáadjuk a második sort (-7) megszorozva.
(3). A harmadik és a negyedik sor megegyezik, az egyiket töröljük. Íme egy ilyen szépség:

Az alapváltozók lépcsőkön helyezkednek el, tehát alapváltozók.
Csak egy szabad változó van, amely nem kapott lépést: .
(4). Fordított mozgás. Az alapváltozókat a szabad változóval fejezzük ki:
A harmadik egyenletből:
![]()
Tekintsük a második egyenletet, és cseréljük be a talált kifejezést:
![]() ,
, ![]() , ,
, ,
Tekintsük az első egyenletet, és cseréljük be a talált kifejezéseket:

Így az általános megoldás egy szabad változóval x 4:
![]()
Még egyszer, hogyan történt? szabad változó x 4 egyedül áll a jogos negyedik helyen. A , , alapváltozókra kapott kifejezések szintén a helyükön vannak.
Azonnal ellenőrizzük az általános megoldást.
A , , alapváltozókat behelyettesítjük a rendszer minden egyenlete bal oldalába:




Az egyenletek megfelelő jobb oldalait megkapjuk, így megtaláljuk a helyes általános megoldást.
Most a megtalált általános megoldásból ![]() két konkrét megoldást kapunk. Itt minden változót egyetlenegyen keresztül fejezünk ki szabad x változó 4. Nem kell törni a fejét.
két konkrét megoldást kapunk. Itt minden változót egyetlenegyen keresztül fejezünk ki szabad x változó 4. Nem kell törni a fejét.
Legyen x 4 = 0, akkor ![]() az első konkrét megoldás.
az első konkrét megoldás.
Legyen x 4 = 1, akkor ![]() egy másik speciális megoldás.
egy másik speciális megoldás.
Válasz: Közös döntés: ![]() . Privát megoldások:
. Privát megoldások:
![]() És .
És .
6. példa:
Keresse meg a lineáris egyenletrendszer általános megoldását!

Az általános megoldást már ellenőriztük, a válaszban megbízhatunk. Az Ön intézkedései eltérhetnek a mi cselekvéseinktől. A lényeg az, hogy az általános megoldások egybeesjenek. Valószínűleg sokan észrevettek egy kellemetlen momentumot a megoldásokban: nagyon gyakran a Gauss-módszer fordított lefolyása során kellett babrálni. közönséges törtek. A gyakorlatban ez igaz, sokkal ritkábban fordulnak elő olyan esetek, amikor nincs tört. Legyen felkészült lelkileg, és ami a legfontosabb, technikailag.
Maradjunk a megoldás azon jellemzőinél, amelyek a megoldott példákban nem szerepeltek. A rendszer általános megoldása néha tartalmazhat konstanst (vagy állandókat).
Például az általános megoldás: . Itt az egyik alapváltozó egy állandó számmal egyenlő: . Ebben nincs semmi egzotikus, előfordul. Nyilvánvaló, hogy ebben az esetben minden konkrét megoldás ötöst tartalmaz az első helyen.
Ritkán, de vannak olyan rendszerek, amelyekben az egyenletek száma nagyobb, mint a változók száma. A Gauss-módszer azonban a legsúlyosabb körülmények között is működik. Nyugodtan kell a rendszer kiterjesztett mátrixát lépcsőzetes formába vinni a szabványos algoritmus szerint. Lehet, hogy egy ilyen rendszer inkonzisztens, végtelenül sok megoldást tartalmazhat, és furcsa módon egyedi megoldása is lehet.
Tanácsunkban megismételjük - annak érdekében, hogy kényelmesen érezze magát egy rendszer Gauss-módszerrel történő megoldása során, meg kell töltenie a kezét, és legalább egy tucat rendszert kell megoldania.
Megoldások és válaszok:
2. példa:
Megoldás:Írjuk fel a rendszer kiterjesztett mátrixát, és elemi transzformációkkal hozzuk lépcsőzetes formába.
Elvégzett elemi átalakítások:
(1) Az első és a harmadik sor felcserélődött.
(2) Az első sort hozzáadtuk a másodikhoz, megszorozva (-6)-tal. Az első sort hozzáadtuk a harmadikhoz, megszorozva (-7)-tel.
(3) A második sort hozzáadtuk a harmadikhoz, megszorozva (-1)-gyel.
Az elemi átalakítások eredményeként egy alakzat sztring, ahol λ ≠ 0 .Tehát a rendszer inkonzisztens.Válasz: nincsenek megoldások.
4. példa:
Megoldás:Felírjuk a rendszer kiterjesztett mátrixát, és elemi transzformációkkal lépésformára hozzuk:

Végrehajtott konverziók:
(egy). Az első sort 2-vel szorozva hozzáadtuk a másodikhoz, az első sort 3-mal szorozva a harmadikhoz.
A második lépéshez nincs egység , a transzformáció (2) pedig ennek megszerzésére irányul.
(2). A második sort hozzáadtuk a harmadikhoz, megszorozva -3-mal.
(3). A második és a harmadik sor felcserélődött (az eredményül kapott -1 átkerült a második lépésbe)
(4). A második sort hozzáadtuk a harmadikhoz, megszorozva 3-mal.
(öt). Az első két sor előjele megváltozott (-1-gyel szorozva), a harmadik sort elosztottuk 14-gyel.
Fordított mozgás:
(egy). Itt az alapvető változók (amelyek a lépéseken vannak), és szabad változók (aki nem kapta meg a lépést).
(2). Az alapváltozókat szabad változókkal fejezzük ki:
A harmadik egyenletből: .
(3). Tekintsük a második egyenletet:, speciális megoldások:
Válasz: Közös döntés: ![]()
Komplex számok
Ebben a részben bemutatjuk a koncepciót összetett szám, fontolgat algebrai, trigonometrikusÉs formát mutatniösszetett szám. Megtanuljuk továbbá a komplex számokkal végzett műveletek végrehajtását: összeadás, kivonás, szorzás, osztás, hatványozás és gyökkivonás.
A komplex számok elsajátításához nincs szükség speciális ismeretekre a felsőfokú matematika tanfolyamából, és az anyag még egy iskolás számára is elérhető. Elég, ha „közönséges” számokkal tud algebrai műveleteket végrehajtani, és emlékezni a trigonometriára.
Először is emlékezzünk a „közönséges” számokra. A matematikában úgy hívják sok valós számok és betűvel vannak jelölve R, vagy R (vastag). Minden valós szám az ismerős számsoron található:

A valós számok társasága nagyon színes - itt vannak egész számok, törtek, és irracionális számok. Ebben az esetben a numerikus tengely minden pontja szükségszerűen megfelel valamilyen valós számnak.
- Rendszerek m lineáris egyenletek -val n ismeretlen.
Lineáris egyenletrendszer megoldása egy ilyen számhalmaz ( x 1, x 2, …, x n), amelyet a rendszer minden egyenletébe behelyettesítve kapjuk meg a helyes egyenlőséget.
ahol a ij , i = 1, …, m; j = 1, …, n a rendszer együtthatói;
b i , i = 1, …, m- ingyenes tagok;
x j , j = 1, …, n- ismeretlen.
A fenti rendszer felírható mátrix formában: A X = B,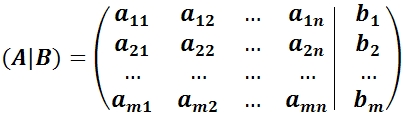


ahol ( A|B) a rendszer fő mátrixa;
A— a rendszer kiterjesztett mátrixa;
x— ismeretlenek oszlopa;
B a szabad tagok oszlopa.
Ha a mátrix B nem nullmátrix ∅, akkor ezt a lineáris egyenletrendszert inhomogénnek nevezzük.
Ha a mátrix B= ∅, akkor ezt a lineáris egyenletrendszert homogénnek nevezzük. Egy homogén rendszernek mindig van nulla (triviális) megoldása: x 1 \u003d x 2 \u003d ..., x n \u003d 0.
Együttes lineáris egyenletrendszer egy lineáris egyenletrendszer, amelynek van megoldása.
Inkonzisztens lineáris egyenletrendszer lineáris egyenletrendszer, amelynek nincs megoldása.
Bizonyos lineáris egyenletrendszer egy lineáris egyenletrendszer, amelynek egyedi megoldása van.
Határozatlan lineáris egyenletrendszer egy lineáris egyenletrendszer, amelynek végtelen számú megoldása van. - N lineáris egyenletrendszer n ismeretlennel
Ha az ismeretlenek száma megegyezik az egyenletek számával, akkor a mátrix négyzet. A mátrix determinánst a lineáris egyenletrendszer fő determinánsának nevezzük, és Δ szimbólummal jelöljük.
Cramer módszer rendszerek megoldására n lineáris egyenletek -val n ismeretlen.
Cramer szabálya.
Ha a lineáris egyenletrendszer fő meghatározója nem nulla, akkor a rendszer konzisztens és definiált, és az egyedi megoldást a Cramer-képletek számítják ki:
ahol Δ i azok a determinánsok, amelyeket a Δ rendszer fő determinánsából kapunk lecseréléssel én oszlopból a szabad tagok oszlopába. . - M lineáris egyenletrendszerek n ismeretlennel
Kronecker-Cappelli tétel.
Ahhoz, hogy ez a lineáris egyenletrendszer konzisztens legyen, szükséges és elegendő, hogy a rendszer mátrixának rangja egyenlő legyen a rendszer kiterjesztett mátrixának rangjával, rang(Α) = rang(Α|B).
Ha cseng(Α) ≠ cseng(Α|B), akkor a rendszernek nyilvánvalóan nincsenek megoldásai.
Ha rang(Α) = rang(Α|B), akkor két eset lehetséges:
1) hang(Α) = n(az ismeretlenek számához) - a megoldás egyedi és a Cramer-képletekkel megkapható;
2) rang (Α)< n − végtelenül sok megoldás létezik. - Gauss módszer lineáris egyenletrendszerek megoldására
Állítsuk össze a kiterjesztett mátrixot ( A|B) az adott együtthatórendszer ismeretlen és jobb oldalon.
A Gauss-módszer vagy az ismeretlenek kiküszöbölésének módszere abban áll, hogy csökkentjük a kiterjesztett mátrixot ( A|B) elemi transzformációk segítségével a sorain átlós alakra (felső háromszög alakra). Visszatérve az egyenletrendszerhez, minden ismeretlen meghatározott.
A karakterláncok elemi transzformációi a következők:
1) két sor felcserélése;
2) egy karakterlánc szorzata 0-tól eltérő számmal;
3) a karakterlánchoz egy másik karakterlánc hozzáadása tetszőleges számmal megszorozva;
4) null karakterlánc elvetése.
Egy diagonális formára redukált kiterjesztett mátrix az adottval egyenértékű lineáris rendszernek felel meg, amelynek megoldása nem okoz nehézséget. . - Homogén lineáris egyenletrendszer.
A homogén rendszernek a következő formája van:
a mátrixegyenletnek felel meg A X = 0.
1) Egy homogén rendszer mindig konzisztens, hiszen r(A) = r(A|B), mindig van nulla megoldás (0, 0, …, 0).
2) Ahhoz, hogy egy homogén rendszernek nullától eltérő megoldása legyen, szükséges és elegendő, hogy r = r(A)< n , ami ekvivalens Δ = 0-val.
3) Ha r< n , akkor Δ = 0, akkor vannak szabad ismeretlenek c 1 , c 2 , …, c n-r, a rendszernek nemtriviális megoldásai vannak, és ezekből végtelenül sok van.
4) Általános megoldás x nál nél r< n mátrix formában a következőképpen írható fel:
X \u003d c 1 X 1 + c 2 X 2 + ... + c n-r X n-r,
hol vannak a megoldások X 1 , X 2 , …, X n-r alapvető megoldási rendszert alkotnak.
5) A megoldások alapvető rendszere a homogén rendszer általános megoldásából nyerhető: ,
,
ha szekvenciálisan feltesszük a paraméterek értékét (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Az általános megoldás bontása a megoldások alapvető rendszere szempontjából az általános megoldás rögzítése, mint az alaprendszerhez tartozó megoldások lineáris kombinációja.
Tétel. Ahhoz, hogy egy lineáris homogén egyenletrendszernek nullától eltérő megoldása legyen, szükséges és elegendő, hogy Δ ≠ 0.
Tehát, ha a determináns Δ ≠ 0, akkor a rendszernek egyedi megoldása van.
Ha Δ ≠ 0, akkor a lineáris homogén egyenletrendszernek végtelen számú megoldása van.
Tétel. Ahhoz, hogy egy homogén rendszernek nullától eltérő megoldása legyen, szükséges és elegendő az r(A)< n .
Bizonyíték:
1) r nem lehet több n(a mátrix rangja nem haladja meg az oszlopok vagy sorok számát);
2) r< n , mivel ha r=n, akkor a rendszer fő determinánsa Δ ≠ 0, és a Cramer-képletek szerint létezik egy egyedi triviális megoldás x 1 \u003d x 2 \u003d ... \u003d x n \u003d 0, ami ellentmond a feltételnek. Eszközök, r(A)< n .
Következmény. A homogén rendszer érdekében n lineáris egyenletek -val n Az ismeretleneknek van nullától eltérő megoldása, szükséges és elegendő, hogy Δ = 0.
- hogy a rendszer együttműködő-e;
- ha a rendszer konzisztens, akkor határozott vagy határozatlan (a rendszerkompatibilitás kritériumát a tétel határozza meg);
- ha a rendszer definiálva van, akkor hogyan találjuk meg egyedi megoldását (a Cramer módszert, az inverz mátrix módszert vagy a Jordan-Gauss módszert alkalmazzuk);
- ha a rendszer határozatlan, akkor hogyan írja le a megoldásainak halmazát.
Lineáris egyenletrendszerek osztályozása
Egy tetszőleges lineáris egyenletrendszer alakja:a 1 1 x 1 + a 1 2 x 2 + ... + a 1 n x n = b 1
a 2 1 x 1 + a 2 2 x 2 + ... + a 2 n x n = b 2
...................................................
a m 1 x 1 + a m 2 x 2 + ... + a m n x n = b m
- Lineáris inhomogén egyenletrendszerek (a változók száma megegyezik az egyenletek számával, m = n).
- Tetszőleges lineáris inhomogén egyenletrendszerek (m > n vagy m< n).
Meghatározás. Két rendszert egyenértékűnek mondunk, ha az első megoldása a második megoldása, és fordítva.
Meghatározás. Az olyan rendszert, amelynek legalább egy megoldása van, ún közös. Az olyan rendszert, amelynek nincs megoldása, inkonzisztensnek nevezzük.
Meghatározás. Egy egyedi megoldású rendszert ún bizonyos, és ha több megoldás is van, az határozatlan.
Algoritmus lineáris egyenletrendszerek megoldására
- Keresse meg a fő és a kiterjesztett mátrixok rangsorait! Ha ezek nem egyenlőek, akkor a Kronecker-Capelli tétel szerint a rendszer inkonzisztens, és itt a vizsgálat véget ér.
- Legyen rang(A) = rang(B) . Kiválasztjuk az alapmollt. Ebben az esetben minden ismeretlen lineáris egyenletrendszer két osztályra oszlik. Azokat az ismeretleneket, amelyek együtthatói az alapmollban szerepelnek, függőnek, azokat az ismeretleneket, amelyek együtthatói az alapmollban nem tartalmazzák, szabadnak nevezzük. Vegye figyelembe, hogy a függő és szabad ismeretlenek kiválasztása nem mindig egyedi.
- Áthúzzuk a rendszer azon egyenleteit, amelyek együtthatói nem szerepeltek az alapmollban, mivel ezek a többi következményei (az alapmoll tétel szerint).
- A szabad ismeretleneket tartalmazó egyenletek feltételei átkerülnek a jobb oldalra. Ennek eredményeként egy r egyenletrendszert kapunk, amelyben az adott egyenlet egyenértékű r ismeretlennel, és amelynek determinánsa különbözik nullától.
- Az így kapott rendszert a következő módok egyikével lehet megoldani: Cramer módszerrel, inverz mátrix módszerrel vagy Jordan-Gauss módszerrel. Olyan kapcsolatokat találunk, amelyek a függő változókat a szabad változókkal fejezik ki.
M lineáris egyenletrendszer n ismeretlennel formarendszernek nevezzük
ahol aijÉs b i (én=1,…,m; b=1,…,n) néhány ismert szám, és x 1,…,x n- ismeretlen. Az együtthatók jelölésében aij első index én jelöli az egyenlet számát, a másodikat j az ismeretlen száma, amelyen ez az együttható áll.
Az ismeretlenek együtthatóit mátrix formájában írjuk fel  , amit hívni fogunk rendszermátrix.
, amit hívni fogunk rendszermátrix.
Az egyenletek jobb oldalán található számok b 1 ,…,b m hívott ingyenes tagok.
Összesített n számok c 1 ,…,c n hívott döntés ennek a rendszernek, ha a rendszer minden egyenlete egyenlőséggé válik, miután számokat helyettesítünk bele c 1 ,…,c n a megfelelő ismeretlenek helyett x 1,…,x n.
A mi feladatunk az lesz, hogy megoldásokat találjunk a rendszerre. Ebben az esetben három helyzet állhat elő:
Olyan lineáris egyenletrendszert nevezünk, amelynek legalább egy megoldása van közös. Ellenkező esetben, pl. ha a rendszernek nincsenek megoldásai, akkor ún összeegyeztethetetlen.
Fontolja meg, hogyan találhat megoldást a rendszerre.
MÁTRIX MÓDSZER LINEÁRIS EGYENLETRENDSZER MEGOLDÁSÁRA
A mátrixok lehetővé teszik egy lineáris egyenletrendszer rövid leírását. Adjunk meg egy három egyenletrendszert három ismeretlennel:

Tekintsük a rendszer mátrixát  valamint ismeretlen és szabad tagok mátrixoszlopai
valamint ismeretlen és szabad tagok mátrixoszlopai 
Keressük meg a terméket

azok. a szorzat eredményeként megkapjuk ennek a rendszernek az egyenleteinek bal oldalát. Ezután a mátrixegyenlőség definícióját használva ezt a rendszert formába írható
 vagy rövidebb A∙X=B.
vagy rövidebb A∙X=B.
Itt a mátrixok AÉs B ismertek, és a mátrix x ismeretlen. Meg kell találni, mert. elemei ennek a rendszernek a megoldása. Ezt az egyenletet ún mátrix egyenlet.
Legyen a mátrix determináns különbözik nullától | A| ≠ 0. Ekkor a mátrixegyenletet a következőképpen oldjuk meg. Szorozzuk meg a bal oldali egyenlet mindkét oldalát a mátrixszal A-1, a mátrix inverze A: . Amennyiben A -1 A = EÉs E∙X=X, akkor a mátrixegyenlet megoldását a formában kapjuk meg X = A -1 B .
Vegye figyelembe, hogy mivel az inverz mátrix csak négyzetes mátrixokra található, a mátrix módszer csak azokat a rendszereket tudja megoldani, amelyekben az egyenletek száma megegyezik az ismeretlenek számával. A rendszer mátrixos jelölése azonban lehetséges abban az esetben is, ha az egyenletek száma nem egyenlő az ismeretlenek számával, akkor a mátrix A nem négyzet alakú, ezért lehetetlen megoldást találni a rendszerre a formában X = A -1 B.
Példák. Egyenletrendszerek megoldása.

CRAMER SZABÁLYA
Tekintsünk egy 3 lineáris egyenletrendszert három ismeretlennel:
A rendszer mátrixának megfelelő harmadrendű determináns, azaz. ismeretlenek együtthatóiból áll,

hívott rendszer meghatározó.
További három determinánst állítunk össze a következőképpen: egymás után 1, 2 és 3 oszlopot helyettesítünk a D determinánsban egy szabad tagok oszlopával.

Ekkor a következő eredményt tudjuk bizonyítani.
Tétel (Cramer-szabály). Ha a rendszer determinánsa Δ ≠ 0, akkor a vizsgált rendszernek csak egy megoldása van, és
![]()
Bizonyíték. Tehát vegyünk egy három egyenletből álló rendszert három ismeretlennel. Szorozzuk meg a rendszer 1. egyenletét az algebrai komplementerrel A 11 elem egy 11, 2. egyenlet - be A21és 3. - on A 31:

Adjuk hozzá ezeket az egyenleteket:
Tekintsük ennek az egyenletnek mindegyik zárójelét és jobb oldalát. A determináns 1. oszlop elemei szerinti kiterjesztésének tételével
Hasonlóképpen kimutatható, hogy és .
Végül is ezt könnyű belátni 
Így megkapjuk az egyenlőséget: .
Következésképpen, .
A és egyenlőségeket hasonlóan levezetjük, ahonnan a tétel állítása következik.
Megjegyezzük tehát, hogy ha a rendszer determinánsa Δ ≠ 0, akkor a rendszernek egyedi megoldása van és fordítva. Ha a rendszer determinánsa egyenlő nullával, akkor a rendszernek vagy végtelen megoldáshalmaza van, vagy nincs megoldása, pl. összeegyeztethetetlen.
Példák. Egyenletrendszer megoldása

GAUSS MÓDSZER
A korábban vizsgált módszerekkel csak azokat a rendszereket lehet megoldani, amelyekben az egyenletek száma egybeesik az ismeretlenek számával, és a rendszer determinánsának nullától eltérőnek kell lennie. A Gauss-módszer univerzálisabb, és tetszőleges számú egyenletű rendszerekhez alkalmas. Ez abból áll, hogy a rendszer egyenleteiből egymás után eltávolítják az ismeretleneket.
Tekintsünk ismét egy három egyenletrendszert három ismeretlennel:
 .
.
Az első egyenletet változatlanul hagyjuk, a 2. és 3. egyenletből pedig kizárjuk a tartalmazó kifejezéseket x 1. Ehhez elosztjuk a második egyenletet de 21 és szorozzuk meg - de 11, majd add össze az 1. egyenlettel. Hasonlóképpen a harmadik egyenletet is felosztjuk de 31 és szorozzuk meg - de 11, majd add hozzá az elsőhöz. Ennek eredményeként az eredeti rendszer a következő formában lesz:

Most az utolsó egyenletből kiküszöböljük a tartalmazó kifejezést x2. Ehhez osszuk el a harmadik egyenletet -vel, szorozzuk meg és adjuk hozzá a másodikhoz. Ekkor lesz egy egyenletrendszerünk:

Ezért az utolsó egyenletből könnyű megtalálni x 3, majd a 2. egyenletből x2és végül 1-től - x 1.
A Gauss-módszer alkalmazásakor az egyenletek szükség esetén felcserélhetők.
Gyakran írás helyett új rendszer az egyenletek a rendszer kiterjesztett mátrixának kiírására korlátozódnak:

majd elemi transzformációk segítségével hozza háromszög vagy átló formába.
NAK NEK elemi átalakulások A mátrixok a következő transzformációkat tartalmazzák:
- sorok vagy oszlopok permutációja;
- egy karakterlánc szorzása nullától eltérő számmal;
- egy sorhoz további sorokat ad.
Példák: Egyenletrendszerek megoldása Gauss-módszerrel.

Így a rendszernek végtelen számú megoldása van.
Az egyenletrendszereket széles körben alkalmazzák a gazdasági iparban különféle folyamatok matematikai modellezésére. Például termelésirányítási és tervezési, logisztikai útvonalak (szállítási probléma) vagy berendezések elhelyezési problémáinak megoldásakor.
Az egyenletrendszereket nemcsak a matematika területén alkalmazzák, hanem a fizikában, a kémiában és a biológiában is, a populációméret meghatározásával kapcsolatos problémák megoldása során.
A lineáris egyenletrendszer két vagy több többváltozós egyenlet kifejezése, amelyekre közös megoldást kell találni. Olyan számsorozat, amelyre minden egyenlet valódi egyenlőséggé válik, vagy azt bizonyítja, hogy a sorozat nem létezik.
Lineáris egyenlet
Az ax+by=c alakú egyenleteket lineárisnak nevezzük. Az x, y jelölések az ismeretlenek, melyek értékét meg kell találni, b, a a változók együtthatói, c az egyenlet szabad tagja.
Az egyenlet megoldása a grafikonja ábrázolásával egy egyenesnek fog kinézni, amelynek minden pontja a polinom megoldása.
Lineáris egyenletrendszerek típusai
A legegyszerűbbek a két X és Y változós lineáris egyenletrendszerek példái.
F1(x, y) = 0 és F2(x, y) = 0, ahol F1,2 függvények és (x, y) függvényváltozók.
Egyenletrendszer megoldása - ez azt jelenti, hogy meg kell találni azokat az értékeket (x, y), amelyeknél a rendszer valódi egyenlőséggé válik, vagy megállapítani, hogy megfelelő értékeket x és y nem létezik.
A pontkoordinátákként felírt értékpárt (x, y) egy lineáris egyenletrendszer megoldásának nevezzük.
Ha a rendszereknek egy közös megoldása van, vagy nincs megoldás, akkor ekvivalensnek nevezzük őket.
A homogén lineáris egyenletrendszerek olyan rendszerek, amelyek jobb oldala nullával egyenlő. Ha az "egyenlőség" jel utáni jobb oldali résznek van értéke, vagy függvény fejezi ki, akkor egy ilyen rendszer nem homogén.
A változók száma jóval több lehet kettőnél, akkor egy három vagy több változós lineáris egyenletrendszer példájáról kell beszélnünk.
A rendszerekkel szembesülve az iskolások azt feltételezik, hogy az egyenletek számának szükségszerűen egybe kell esnie az ismeretlenek számával, de ez nem így van. A rendszerben lévő egyenletek száma nem függ a változóktól, tetszőlegesen sok lehet belőlük.
Egyszerű és összetett módszerek egyenletrendszerek megoldására
Az ilyen rendszerek megoldására nincs általános analitikus módszer, minden módszer numerikus megoldásokon alapul. Az iskolai matematika tantárgy részletesen ismerteti a permutációt, az algebrai összeadást, a helyettesítést, valamint a grafikus és mátrixos módszert, a Gauss-módszerrel történő megoldást.
A megoldási módszerek tanításának fő feladata a rendszer helyes elemzésének és keresésének megtanítása optimális algoritmus megoldásokat az egyes példákra. A lényeg nem az, hogy megjegyezzük az egyes módszerek szabályrendszerét és cselekvéseit, hanem megértsük egy adott módszer alkalmazásának alapelveit.
Példák megoldása a program 7. osztályának lineáris egyenletrendszerére középiskola nagyon egyszerű és nagyon részletesen el van magyarázva. Bármely matematikai tankönyvben erre a részre kellő figyelmet fordítanak. A lineáris egyenletrendszerek példáinak Gauss és Cramer módszerével történő megoldását részletesebben tanulmányozzák a felsőoktatási intézmények első kurzusai.
Rendszerek megoldása helyettesítési módszerrel
A helyettesítési módszer műveletei arra irányulnak, hogy az egyik változó értékét a másodikon keresztül fejezzük ki. A kifejezést behelyettesítjük a fennmaradó egyenletbe, majd egyetlen változós alakra redukáljuk. A művelet megismétlődik a rendszerben lévő ismeretlenek számától függően
Adjunk példát egy 7. osztályú lineáris egyenletrendszerre helyettesítési módszerrel:

Amint a példából látható, az x változót az F(X) = 7 + Y függvényen keresztül fejeztük ki. Az eredményül kapott kifejezés, amelyet a rendszer 2. egyenletébe X helyett behelyettesítettünk, segített egy Y változót kapni a 2. egyenletben. . A példa megoldása nem okoz nehézséget, és lehetővé teszi az Y érték megszerzését Az utolsó lépés a kapott értékek ellenőrzése.
Egy lineáris egyenletrendszer példáját nem mindig lehet helyettesítéssel megoldani. Az egyenletek bonyolultak lehetnek, és a változó kifejezése a második ismeretlennel túl nehézkes lesz a további számításokhoz. Ha 3-nál több ismeretlen van a rendszerben, a helyettesítési megoldás sem praktikus.
Lineáris inhomogén egyenletrendszer példájának megoldása:

Megoldás algebrai összeadással
Amikor megoldást keresünk rendszerekre az összeadás módszerével, az egyenletek tagonkénti összeadásával és szorzásával különféle számok. A matematikai műveletek végső célja egy változós egyenlet.

A módszer alkalmazása gyakorlást és megfigyelést igényel. Nem könnyű egy lineáris egyenletrendszert az összeadás módszerével megoldani, ha a változók száma 3 vagy több. Az algebrai összeadás akkor hasznos, ha az egyenletek törteket és decimális számokat tartalmaznak.
Megoldás műveleti algoritmusa:
- Szorozzuk meg az egyenlet mindkét oldalát valamilyen számmal. Ennek eredményeként aritmetikai művelet a változó egyik együtthatójának egyenlőnek kell lennie 1-gyel.
- Adja hozzá a kapott kifejezést kifejezésenként, és keresse meg az egyik ismeretlent.
- Helyettesítse be a kapott értéket a rendszer 2. egyenletébe, és keresse meg a fennmaradó változót.
Megoldási módszer egy új változó bevezetésével
Új változót akkor lehet bevezetni, ha a rendszernek legfeljebb két egyenletre kell megoldást találnia, az ismeretlenek száma szintén nem lehet több kettőnél.
A módszer az egyik egyenlet egyszerűsítésére szolgál egy új változó bevezetésével. Az új egyenletet a beírt ismeretlenre vonatkozóan oldjuk meg, és a kapott értékkel határozzuk meg az eredeti változót.
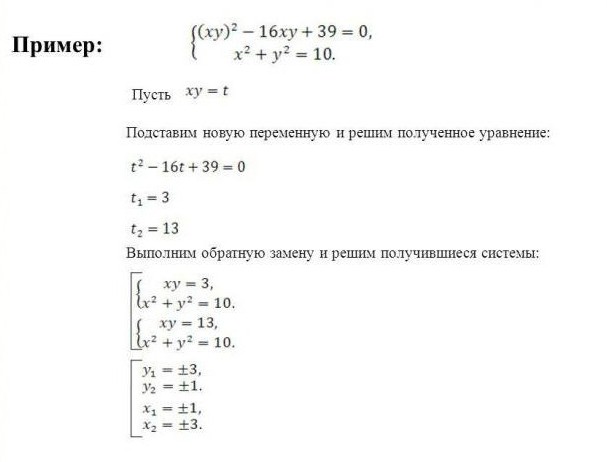
A példa azt mutatja, hogy egy új t változó bevezetésével sikerült a rendszer 1. egyenletét a szabványra redukálni. négyzetes trinomikus. A polinomot a diszkrimináns megtalálásával oldhatja meg.
Meg kell találni a diszkrimináns értékét a segítségével jól ismert képlet: D = b2 - 4*a*c, ahol D a kívánt diszkrimináns, b, a, c a polinom szorzói. Az adott példában a=1, b=16, c=39, tehát D=100. Ha a diszkrimináns nagyobb, mint nulla, akkor két megoldás létezik: t = -b±√D / 2*a, ha a diszkrimináns kisebb, mint nulla, akkor csak egy megoldás van: x= -b / 2*a.
A kapott rendszerekre a megoldást az összeadás módszerével találjuk meg.
Vizuális módszer rendszerek megoldására
Alkalmas 3 egyenletet tartalmazó rendszerekhez. A módszer abból áll, hogy a rendszerben szereplő minden egyenlet grafikonját a koordinátatengelyen ábrázoljuk. A görbék metszéspontjainak koordinátái a rendszer általános megoldása lesz.
A grafikus módszernek számos árnyalata van. Vegyünk néhány példát a lineáris egyenletrendszerek vizuális megoldására.

Amint a példából látható, minden sorhoz két pontot állítottunk össze, az x változó értékeit tetszőlegesen választottuk ki: 0 és 3. Az x értékei alapján y értéket találtunk: 3 és 0. A (0, 3) és (3, 0) koordinátájú pontokat a grafikonon jelöltük, és egy vonallal kötöttük össze.
A lépéseket meg kell ismételni a második egyenletnél. Az egyenesek metszéspontja a rendszer megoldása.
A következő példában meg kell találni a lineáris egyenletrendszer grafikus megoldását: 0,5x-y+2=0 és 0,5x-y-1=0.

Ahogy a példából is látszik, a rendszernek nincs megoldása, mert a gráfok párhuzamosak és nem metszik egymást teljes hosszukban.

A 2. és 3. példában szereplő rendszerek hasonlóak, de megalkotásukkor nyilvánvalóvá válik, hogy megoldásaik eltérőek. Nem szabad elfelejteni, hogy nem mindig lehet megmondani, hogy a rendszernek van-e megoldása vagy sem, mindig szükség van egy gráf felépítésére.
Mátrix és fajtái
A mátrixok egy lineáris egyenletrendszer rövid leírására szolgálnak. A mátrix egy speciális típusú táblázat, amely számokkal van kitöltve. Az n*m-nek n - sora és m - oszlopa van.
A mátrix négyzet alakú, ha az oszlopok és sorok száma egyenlő. A mátrixvektor egy egyoszlopos mátrix, amelynek végtelen számú sora van. Az egyik átló mentén egységeket és más nullaelemeket tartalmazó mátrixot azonosságnak nevezünk.
Az inverz mátrix egy olyan mátrix, amellyel megszorozva az eredeti egységgé alakul, ilyen mátrix csak az eredeti négyzethez létezik.
Egyenletrendszer mátrixmá alakításának szabályai
Az egyenletrendszerek esetében az egyenletek együtthatóit és szabad tagjait a mátrix számaiként írjuk fel, egy egyenlet a mátrix egy sora.
Egy mátrixsort nem nullának nevezünk, ha a sor legalább egy eleme nem egyenlő nullával. Ezért, ha bármelyik egyenletben a változók száma eltér, akkor a hiányzó ismeretlen helyére nullát kell beírni.
A mátrix oszlopainak szigorúan meg kell felelniük a változóknak. Ez azt jelenti, hogy az x változó együtthatói csak egy oszlopba írhatók, például az első, az ismeretlen y együtthatója - csak a másodikba.
Egy mátrix szorzásakor az összes mátrixelemet egymás után megszorozzuk egy számmal.
Az inverz mátrix megtalálásának lehetőségei
Az inverz mátrix megtalálásának képlete meglehetősen egyszerű: K -1 = 1 / |K|, ahol K -1 az inverz mátrix és |K| - mátrix meghatározó. |K| nem lehet egyenlő nullával, akkor a rendszernek van megoldása.
A determináns könnyen kiszámítható kettős-kettős mátrix esetén, csak az elemeket átlósan kell megszorozni egymással. A "háromszor három" opcióhoz létezik egy képlet |K|=a 1 b 2 c 3 + a 1 b 3 c 2 + a 3 b 1 c 2 + a 2 b 3 c 1 + a 2 b 1 c 3 + a 3 b 2 c 1 . Használhatja a képletet, vagy ne feledje, hogy minden sorból és minden oszlopból ki kell venni egy elemet, hogy az elemek oszlop- és sorszámai ne ismétlődjenek a szorzatban.
Lineáris egyenletrendszerek példáinak megoldása mátrix módszerrel
A megoldáskeresés mátrixos módszere lehetővé teszi a nehézkes jelölések csökkentését a rendszer megoldása során nagy mennyiség változók és egyenletek.

A példában a nm az egyenletek együtthatói, a mátrix egy vektor, x n a változók, és b n a szabad tagok.


Rendszerek megoldása Gauss-módszerrel
A felsőbb matematikában a Gauss-módszert a Cramer-módszerrel együtt tanulmányozzák, a rendszerek megoldásának folyamatát pedig Gauss-Cramer megoldási módszernek nevezik. Ezekkel a módszerekkel nagyszámú lineáris egyenletet tartalmazó rendszerek változóit kereshetjük meg.
A Gauss-módszer nagyon hasonlít a szubsztitúciós és algebrai összeadás megoldásokhoz, de szisztematikusabb. Az iskolai kurzusban a Gauss-megoldást használják 3 és 4 egyenletrendszerekre. A módszer célja, hogy a rendszert fordított trapéz alakúra hozza. Algebrai transzformációkkal és behelyettesítésekkel egy változó értékét megtaláljuk a rendszer egyik egyenletében. A második egyenlet egy kifejezés 2 ismeretlennel, és 3 és 4 - 3, illetve 4 változóval.
Miután a rendszert a leírt formába hoztuk, a további megoldás az ismert változók szekvenciális behelyettesítésére redukálódik a rendszer egyenleteiben.
A 7. osztályos iskolai tankönyvekben a Gauss-féle megoldás példája a következő:

Amint a példából látható, a (3) lépésben két egyenletet kaptunk: 3x 3 -2x 4 =11 és 3x 3 +2x 4 =7. Bármelyik egyenlet megoldása lehetővé teszi az x n változók egyikének kiderítését.

A szövegben említett 5. tétel kimondja, hogy ha a rendszer egyik egyenletét egy ekvivalensre cseréljük, akkor a kapott rendszer is ekvivalens lesz az eredetivel.
A Gauss-módszer nehezen érthető a tanulók számára Gimnázium, de az egyik legtöbb érdekes módokon az emelt szintű képzésre beiratkozott gyerekek találékonyságának fejlesztése matematika és fizika órákon.
A rögzítési számítások megkönnyítése érdekében a következőket szokás tenni:

Az egyenletegyütthatókat és a szabad tagokat mátrix formájában írjuk fel, ahol a mátrix minden sora megfelel a rendszer valamelyik egyenletének. elválasztja az egyenlet bal oldalát a jobb oldaltól. A római számok a rendszer egyenletek számát jelölik.
Először felírják a mátrixot, amellyel dolgozni kell, majd az egyik sorral végrehajtott összes műveletet. A kapott mátrixot a „nyíl” jel után írjuk, és folytassa a szükséges algebrai műveletek végrehajtását az eredmény eléréséig.
Ennek eredményeként olyan mátrixot kell kapni, amelyben az egyik átló 1, és az összes többi együttható nulla, vagyis a mátrix egyetlen formára redukálódik. Nem szabad megfeledkeznünk az egyenlet mindkét oldalának számozásáról sem.
Ez a jelölés kevésbé körülményes, és lehetővé teszi, hogy ne terelje el a figyelmét számos ismeretlen felsorolása.
Bármely megoldási mód ingyenes alkalmazása körültekintést és bizonyos tapasztalatot igényel. Nem minden módszert alkalmaznak. A megoldások megtalálásának bizonyos módjai előnyösebbek az emberi tevékenység egy bizonyos területén, míg mások tanulási céllal léteznek.
Azt is ajánljuk
 Kapcsolt tápegység: javítás és finomítás
Kapcsolt tápegység: javítás és finomítás
 A fény távirányítója
A fény távirányítója
 Úszásoktatás óvodás korú gyermekek számára
Úszásoktatás óvodás korú gyermekek számára
 Megjegyzések a mesternek - otthoni háztartási riasztók
Megjegyzések a mesternek - otthoni háztartási riasztók
 Órapropeller az Atmega8-on
Órapropeller az Atmega8-on
 Példák az eszközre és a relé alkalmazására, hogyan válasszuk ki és helyesen csatlakoztassuk a relét Mikrokontroller és relé egyszerű kapcsolóáramkörök
Példák az eszközre és a relé alkalmazására, hogyan válasszuk ki és helyesen csatlakoztassuk a relét Mikrokontroller és relé egyszerű kapcsolóáramkörök