Sistemul de ecuații liniare se numește articulație dacă mti. Cum să găsiți o soluție generală și particulară a unui sistem de ecuații liniare
Continuăm să ne ocupăm de sisteme de ecuații liniare. Până acum, am luat în considerare sisteme care au o soluție unică. Astfel de sisteme pot fi rezolvate în orice mod: metoda de substitutie("şcoală") prin formulele lui Cramer, metoda matricei, metoda Gauss. Cu toate acestea, încă două cazuri sunt larg răspândite în practică atunci când:
1) sistemul este inconsecvent (nu are soluții);
2) sistemul are infinite de soluții.
Pentru aceste sisteme, se utilizează cea mai universală dintre toate metodele de soluție - metoda Gauss. De fapt, și modul „școală” va duce la răspuns, dar în matematica superioara Se obișnuiește să se folosească metoda gaussiană de eliminare succesivă a necunoscutelor. Cei care nu sunt familiarizați cu algoritmul metodei Gauss, vă rugăm să studiați mai întâi lecția metoda Gauss
Transformările matriceale elementare în sine sunt exact aceleași, diferența va fi în finalul soluției. Mai întâi, luați în considerare câteva exemple în care sistemul nu are soluții (incoerente).
Exemplul 1
Ce vă atrage imediat atenția în acest sistem? Numărul de ecuații este mai mic decât numărul de variabile. Există o teoremă care spune: „Dacă numărul de ecuații din sistem cantitate mai mica variabile, atunci sistemul fie este inconsecvent, fie are infinite de soluții.Și rămâne doar de aflat.
Începutul soluției este destul de obișnuit - scriem matricea extinsă a sistemului și, folosind transformări elementare, o aducem într-o formă de pas:

(unu). Pe pasul din stânga sus, trebuie să obținem (+1) sau (-1). Nu există astfel de numere în prima coloană, așa că rearanjarea rândurilor nu va funcționa. Unitatea va trebui organizată independent, iar acest lucru se poate face în mai multe moduri. Așa am făcut. La prima linie adăugăm a treia linie, înmulțită cu (-1).
(2). Acum obținem două zerouri în prima coloană. La a doua linie, adăugați prima linie, înmulțită cu 3. La a treia linie, adăugați prima, înmulțită cu 5.
(3). După ce transformarea este făcută, este întotdeauna recomandabil să vedeți dacă este posibil să simplificați șirurile rezultate? Poate sa. Împărțim a doua linie la 2, obținând în același timp și cea dorită (-1) pe a doua treaptă. Împărțiți a treia linie la (-3).
(4). Adăugați a doua linie la a treia linie. Probabil, toată lumea a acordat atenție liniei proaste, care s-a dovedit ca urmare a transformărilor elementare:
![]() . Este clar că nu poate fi așa.
. Este clar că nu poate fi așa.
Într-adevăr, rescriem matricea rezultată

înapoi la sistemul de ecuații liniare:

Dacă în urma transformărilor elementare un şir de formă , Undeλ este un număr diferit de zero, atunci sistemul este inconsecvent (nu are soluții).
Cum să înregistrezi sfârșitul unei sarcini? Trebuie să scrieți fraza:
„În urma transformărilor elementare se obține un șir de formă, unde λ ≠ 0 ". Răspuns: „Sistemul nu are soluții (incoerente).”
Vă rugăm să rețineți că în acest caz nu există o mișcare inversă a algoritmului gaussian, nu există soluții și pur și simplu nu există nimic de găsit.
Exemplul 2
Rezolvați un sistem de ecuații liniare 
Acesta este un exemplu de do-it-yourself. Soluție completăși răspunsul la sfârșitul lecției.
Din nou, vă reamintim că procesul dumneavoastră de soluție poate diferi de procesul nostru de soluție, metoda Gauss nu stabilește un algoritm clar, trebuie să ghiciți singur procedura și acțiunile în fiecare caz.
Încă una caracteristica tehnica soluții: transformările elementare pot fi oprite imediat, de îndată ce o linie ca , unde λ ≠ 0 . Considera exemplu condițional: să presupunem că după prima transformare obținem o matrice
 .
.
Această matrice nu a fost încă redusă la o formă în trepte, dar nu este nevoie de alte transformări elementare, deoarece a apărut o linie a formei, unde λ ≠ 0 . Ar trebui să se răspundă imediat că sistemul este incompatibil.
Când un sistem de ecuații liniare nu are soluții, acesta este aproape un cadou pentru elev, datorită faptului că se obține o soluție scurtă, uneori literalmente în 2-3 pași. Dar totul în această lume este echilibrat, iar problema în care sistemul are infinit de soluții este doar mai lungă.
Exemplul 3:
Rezolvați un sistem de ecuații liniare

Există 4 ecuații și 4 necunoscute, așa că sistemul poate fie să aibă o singură soluție, fie să nu aibă soluții, fie să aibă infinite de soluții. Oricare ar fi fost, dar metoda Gauss, în orice caz, ne va conduce la răspuns. Aceasta este versatilitatea sa.
Începutul este din nou standard. Scriem matricea extinsă a sistemului și, folosind transformări elementare, o aducem la o formă de pas:

Asta e tot și ți-a fost frică.
(unu). Vă rugăm să rețineți că toate numerele din prima coloană sunt divizibile cu 2, așa că pe treapta din stânga sus ne mulțumim și cu un doi. La a doua linie adăugăm prima linie, înmulțită cu (-4). La a treia linie adăugăm prima linie, înmulțită cu (-2). La a patra linie adăugăm prima linie, înmulțită cu (-1).
Atenţie! Mulți pot fi tentați din a patra linie scădea prima linie. Acest lucru se poate face, dar nu este necesar, experiența arată că probabilitatea unei erori în calcule crește de mai multe ori. Adăugăm doar: la a patra linie adăugăm prima linie, înmulțită cu (-1) - exact!
(2). Ultimele trei rânduri sunt proporționale, două dintre ele pot fi șterse. Din nou aici este necesar să se arate atenție sporită, dar liniile sunt cu adevărat proporționale? Pentru reasigurare, nu va fi de prisos să înmulțiți al doilea rând cu (-1) și să împărțiți al patrulea rând cu 2, rezultând trei rânduri identice. Și numai după aceea eliminați două dintre ele. Ca rezultat al transformărilor elementare, matricea extinsă a sistemului este redusă la o formă în trepte:

Când finalizați o sarcină într-un caiet, este recomandabil să faceți aceleași note în creion pentru claritate.
Rescriem sistemul de ecuații corespunzător: 
Singura soluție „obișnuită” a sistemului nu miroase aici. Linie proastă unde λ ≠ 0, de asemenea nu. Prin urmare, acesta este al treilea caz rămas - sistemul are infinite de soluții.
Setul infinit de soluții ale sistemului este scris pe scurt sub forma așa-numitului soluție generală de sistem.
Vom găsi soluția generală a sistemului folosind mișcarea inversă a metodei Gauss. Pentru sistemele de ecuații cu un set infinit de soluții apar concepte noi: „variabile de bază”Și "variabile libere". Mai întâi, să definim ce variabile avem de bazăși ce variabile - gratuit. Nu este necesar să explicăm în detaliu termenii algebrei liniare, este suficient să ne amintim că există astfel variabile de bazăȘi variabile libere.
Variabilele de bază „stau” întotdeauna strict pe treptele matricei. În acest exemplu, variabilele de bază sunt X 1 și X 3 .
Variabilele gratuite sunt totul restul variabile care nu au primit un pas. În cazul nostru, sunt două: X 2 și X 4 - variabile libere.
Acum ai nevoie toatevariabile de bază expres numai prinvariabile libere. Mișcarea inversă a algoritmului gaussian funcționează în mod tradițional de jos în sus. Din a doua ecuație a sistemului, exprimăm variabila de bază X 3:
Acum uitați-vă la prima ecuație: ![]() . În primul rând, înlocuim expresia găsită în ea:
. În primul rând, înlocuim expresia găsită în ea:
![]()
Rămâne de exprimat variabila de bază X 1 prin variabile libere X 2 și X 4:

Rezultatul este ceea ce aveți nevoie - toate variabile de bază ( X 1 și X 3) exprimat numai prin variabile libere ( X 2 și X 4):
![]()
De fapt, soluția generală este gata:
![]() .
.
Cum să notez soluția generală? În primul rând, variabilele libere sunt scrise în soluția generală „pe cont propriu” și strict la locul lor. În acest caz, variabilele libere X 2 și X 4 trebuie scris în pozițiile a doua și a patra:
 .
.
Expresiile rezultate pentru variabilele de bază ![]() și, evident, trebuie scris în prima și a treia poziție:
și, evident, trebuie scris în prima și a treia poziție:

Din soluția generală a sistemului, se pot găsi infinitate decizii private. E foarte simplu. variabile libere X 2 și X 4 sunt numite astfel pentru că pot fi date orice valori finale. Cele mai populare valori sunt valorile zero, deoarece aceasta este cea mai simplă modalitate de a obține o anumită soluție.
Înlocuind ( X 2 = 0; X 4 = 0) în soluția generală, obținem una dintre soluțiile particulare:
![]() , sau este o soluție particulară corespunzătoare variabilelor libere cu valori ( X 2 = 0; X 4 = 0).
, sau este o soluție particulară corespunzătoare variabilelor libere cu valori ( X 2 = 0; X 4 = 0).
Cei sunt un alt cuplu dulce, hai să înlocuim ( X 2 = 1 și X 4 = 1) în soluția generală:
![]() , adică (-1; 1; 1; 1) este o altă soluție particulară.
, adică (-1; 1; 1; 1) este o altă soluție particulară.
Este ușor de observat că sistemul de ecuații are infinit de solutiiîntrucât putem da variabile libere orice valorile.
Fiecare o anumită soluție trebuie să satisfacă Pentru fiecare ecuația sistemului. Aceasta este baza pentru o verificare „rapidă” a corectitudinii soluției. Luați, de exemplu, o anumită soluție (-1; 1; 1; 1) și înlocuiți-o în partea stângă a fiecărei ecuații din sistemul original:
Totul trebuie să vină împreună. Și cu orice soluție specială pe care o obțineți, totul ar trebui să convergă.
Strict vorbind, verificarea unei anumite soluții înșală uneori, adică. o anumită soluție poate satisface fiecare ecuație a sistemului, iar soluția generală în sine este de fapt găsită incorect. Prin urmare, în primul rând, verificarea soluției generale este mai amănunțită și mai fiabilă.
Cum se verifică soluția generală rezultată ![]() ?
?
Nu este dificil, dar necesită o transformare destul de lungă. Trebuie să luăm expresii de bază variabile, în acest caz ![]() și , și înlocuiți-le în partea stângă a fiecărei ecuații a sistemului.
și , și înlocuiți-le în partea stângă a fiecărei ecuații a sistemului.
În partea stângă a primei ecuații a sistemului:

Se obține partea dreaptă a primei ecuații originale a sistemului.
În partea stângă a celei de-a doua ecuații a sistemului:

Se obține partea dreaptă a celei de-a doua ecuații originale a sistemului.
Și mai departe - în partea stângă a celei de-a treia și a patra ecuații ale sistemului. Această verificare este mai lungă, dar garantează corectitudinea 100% a soluției globale. În plus, în unele sarcini este necesară verificarea soluției generale.
Exemplul 4:
Rezolvați sistemul folosind metoda Gauss. Găsiți o soluție generală și două private. Verificați soluția generală.

Acesta este un exemplu de do-it-yourself. Aici, apropo, din nou, numărul de ecuații este mai mic decât numărul de necunoscute, ceea ce înseamnă că este imediat clar că sistemul va fi fie inconsecvent, fie cu un număr infinit de soluții.
Exemplul 5:
Rezolvați un sistem de ecuații liniare. Dacă sistemul are infinit de soluții, găsiți două soluții particulare și verificați soluția generală

Soluţie: Să notăm matricea extinsă a sistemului și, cu ajutorul transformărilor elementare, să o aducem într-o formă în trepte:

(unu). Adăugați prima linie la a doua linie. La a treia linie adăugăm prima linie înmulțită cu 2. La a patra linie adăugăm prima linie înmulțită cu 3.
(2). La a treia linie adăugăm a doua linie, înmulțită cu (-5). La a patra linie adăugăm a doua linie, înmulțită cu (-7).
(3). Al treilea și al patrulea rând sunt aceleași, ștergem unul dintre ele. Iată o asemenea frumusețe:

Variabilele de bază stau pe trepte, deci sunt variabile de bază.
Există o singură variabilă liberă, care nu a primit un pas: .
(4). Mișcare inversă. Exprimăm variabilele de bază în termeni de variabilă liberă:
Din a treia ecuație:
![]()
Luați în considerare a doua ecuație și înlocuiți în ea expresia găsită:
![]() ,
, ![]() , ,
, ,
Luați în considerare prima ecuație și înlocuiți expresiile găsite și în ea:

Astfel, soluția generală cu o variabilă liberă X 4:
![]()
Încă o dată, cum s-a întâmplat? variabilă liberă X 4 stă singur pe locul al patrulea de drept. Expresiile rezultate pentru variabilele de bază , , sunt de asemenea la locul lor.
Să verificăm imediat soluția generală.
Înlocuim variabilele de bază , , în partea stângă a fiecărei ecuații a sistemului:




Se obțin părțile din dreapta corespunzătoare ale ecuațiilor, astfel se găsește soluția generală corectă.
Acum din soluția generală găsită ![]() obținem două soluții particulare. Toate variabilele sunt exprimate aici printr-o singură variabilă liberă x 4 . Nu trebuie să-ți rupi capul.
obținem două soluții particulare. Toate variabilele sunt exprimate aici printr-o singură variabilă liberă x 4 . Nu trebuie să-ți rupi capul.
Lasa X 4 = 0, atunci ![]() este prima soluție particulară.
este prima soluție particulară.
Lasa X 4 = 1, atunci ![]() este o altă soluție specială.
este o altă soluție specială.
Răspuns: Decizie comună: ![]() . Soluții private:
. Soluții private:
![]() Și .
Și .
Exemplul 6:
Aflați soluția generală a sistemului de ecuații liniare.

Am verificat deja soluția generală, răspunsul poate fi de încredere. Cursul dumneavoastră de acțiune poate diferi de cursul nostru de acțiune. Principalul lucru este că soluțiile generale coincid. Probabil, mulți au observat un moment neplăcut în soluții: de foarte multe ori, în cursul invers al metodei Gauss, a trebuit să ne luptăm cu fracții obișnuite. În practică, acest lucru este adevărat, cazurile în care nu există fracții sunt mult mai puțin frecvente. Fii pregătit mental și, cel mai important, tehnic.
Să ne oprim asupra caracteristicilor soluției care nu au fost găsite în exemplele rezolvate. Soluția generală a sistemului poate include uneori o constantă (sau constante).
De exemplu, soluția generală: . Aici una dintre variabilele de bază este egală cu un număr constant: . Nu este nimic exotic în asta, se întâmplă. Evident, în acest caz, orice soluție anume va conține un cinci în prima poziție.
Rareori, dar există sisteme în care numărul de ecuații este mai mare decât numărul de variabile. Cu toate acestea, metoda Gauss funcționează în cele mai severe condiții. Ar trebui să aduceți calm matricea extinsă a sistemului într-o formă în trepte conform algoritmului standard. Un astfel de sistem poate fi inconsecvent, poate avea infinit de soluții și, în mod ciudat, poate avea o soluție unică.
Repetăm în sfatul nostru - pentru a vă simți confortabil atunci când rezolvați un sistem folosind metoda Gauss, ar trebui să vă umpleți mâna și să rezolvați cel puțin o duzină de sisteme.
Solutii si raspunsuri:
Exemplul 2:
Soluţie:Să notăm matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă în trepte.
Transformări elementare efectuate:
(1) Prima și a treia linie au fost schimbate.
(2) Prima linie a fost adăugată la a doua linie, înmulțită cu (-6). Prima linie a fost adăugată la a treia linie, înmulțită cu (-7).
(3) A doua linie a fost adăugată la a treia linie, înmulțită cu (-1).
Ca rezultat al transformărilor elementare, un șir de formă, Unde λ ≠ 0 .Deci sistemul este inconsecvent.Răspuns: nu exista solutii.
Exemplul 4:
Soluţie:Scriem matricea extinsă a sistemului și, folosind transformări elementare, o aducem la o formă de pas:

Conversii efectuate:
(unu). Prima linie înmulțită cu 2 a fost adăugată la a doua linie, prima linie înmulțită cu 3 a fost adăugată la a treia linie.
Nu există nicio unitate pentru a doua etapă , iar transformarea (2) are ca scop obținerea acesteia.
(2). A doua linie a fost adăugată la a treia linie, înmulțită cu -3.
(3). Al doilea și al treilea rând au fost schimbate (-1 rezultat a fost mutat la a doua etapă)
(4). A doua linie a fost adăugată la a treia linie, înmulțită cu 3.
(cinci). Semnul primelor două linii a fost schimbat (înmulțit cu -1), a treia linie a fost împărțită la 14.
Mișcare inversă:
(unu). Aici sunt variabilele de bază (care sunt pe trepte) și sunt variabile libere (care nu au primit pasul).
(2). Exprimăm variabilele de bază în termeni de variabile libere:
Din a treia ecuație: .
(3). Luați în considerare a doua ecuație:, soluții speciale:
Răspuns: Decizie comună: ![]()
Numere complexe
În această secțiune, vom introduce conceptul număr complex, considera algebric, trigonometricȘi arata forma număr complex. Și, de asemenea, învățați cum să efectuați operații cu numere complexe: adunarea, scăderea, înmulțirea, împărțirea, exponențiarea și extragerea rădăcinilor.
Pentru a stăpâni numerele complexe, nu aveți nevoie de cunoștințe speciale din cursul de matematică superioară, iar materialul este disponibil chiar și pentru un școlar. Este suficient să puteți efectua operații algebrice cu numere „obișnuite” și să vă amintiți trigonometria.
În primul rând, să ne amintim de numerele „obișnuite”. În matematică se numesc mulți numere reale și sunt marcate cu litera R, sau R (gros). Toate numerele reale se află pe linia numerică familiară:

Compania numerelor reale este foarte colorată - aici sunt numere întregi și fracții și numere irationale. În acest caz, fiecare punct al axei numerice corespunde în mod necesar unui număr real.
- Sisteme m ecuații liniare cu n necunoscut.
Rezolvarea unui sistem de ecuații liniare este un astfel de set de numere ( x 1 , x 2 , …, x n), înlocuind cu care în fiecare dintre ecuațiile sistemului se obține egalitatea corectă.
Unde a ij , i = 1, …, m; j = 1, …, n sunt coeficienții sistemului;
b i , i = 1, …, m- membri gratuiti;
x j , j = 1, …, n- necunoscut.
Sistemul de mai sus poate fi scris sub formă de matrice: A X = B,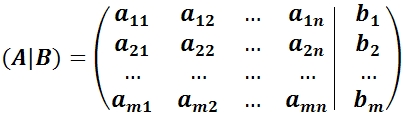


Unde ( A|B) este matricea principală a sistemului;
A— matrice extinsă a sistemului;
X— coloana de necunoscute;
B este o coloană de membri liberi.
Dacă matricea B nu este o matrice nulă ∅, atunci acest sistem de ecuații liniare se numește neomogen.
Dacă matricea B= ∅, atunci acest sistem de ecuații liniare se numește omogen. Un sistem omogen are întotdeauna o soluție zero (trivială): x 1 \u003d x 2 \u003d ..., x n \u003d 0.
Sistem comun de ecuații liniare este un sistem de ecuații liniare care are o soluție.
Sistem inconsecvent de ecuații liniare este un sistem de ecuații liniare care nu are soluție.
Anumit sistem de ecuații liniare este un sistem de ecuații liniare care are o soluție unică.
Sistem nedefinit de ecuații liniare este un sistem de ecuații liniare care are un număr infinit de soluții. - Sisteme de n ecuații liniare cu n necunoscute
Dacă numărul de necunoscute este egal cu numărul de ecuații, atunci matricea este pătrată. Determinantul matricei se numește determinantul principal al sistemului de ecuații liniare și este notat cu simbolul Δ.
Metoda Cramer pentru rezolvarea sistemelor n ecuații liniare cu n necunoscut.
regula lui Cramer.
Dacă determinantul principal al sistemului de ecuații liniare nu este zero, atunci sistemul este consistent și definit, iar soluția unică este calculată prin formulele Cramer:
unde Δ i sunt determinanții obținuți din determinantul principal al sistemului Δ prin înlocuire i a coloana la coloana membrilor liberi. . - Sisteme de m ecuații liniare cu n necunoscute
Teorema Kronecker-Cappelli.
Pentru ca acest sistem de ecuații liniare să fie consistent, este necesar și suficient ca rangul matricei sistemului să fie egal cu rangul matricei extinse a sistemului, rang(Α) = rang(Α|B).
Dacă song(Α) ≠ song(Α|B), atunci sistemul evident nu are soluții.
Dacă rang(Α) = rang(Α|B), atunci sunt posibile două cazuri:
1) sunat(Α) = n(la numarul de necunoscute) - solutia este unica si poate fi obtinuta prin formulele lui Cramer;
2) rang (Α)< n − există infinit de multe soluții. - metoda Gauss pentru rezolvarea sistemelor de ecuații liniare
Să compunem matricea augmentată ( A|B) a sistemului dat de coeficienți din partea necunoscută și din dreapta.
Metoda Gaussiană sau metoda eliminării necunoscutelor constă în reducerea matricei augmentate ( A|B) cu ajutorul transformărilor elementare peste rândurile sale la o formă diagonală (la o formă triunghiulară superioară). Revenind la sistemul de ecuații, toate necunoscutele sunt determinate.
Transformările elementare pe șiruri includ următoarele:
1) schimbarea a două linii;
2) înmulțirea unui șir cu un alt număr decât 0;
3) adăugarea la șir a unui alt șir înmulțit cu un număr arbitrar;
4) eliminarea unui șir nul.
O matrice extinsă redusă la o formă diagonală corespunde unui sistem liniar echivalent cu cel dat, a cărui soluție nu provoacă dificultăți. . - Sistem de ecuații liniare omogene.
Sistemul omogen are forma:
corespunde ecuației matriceale A X = 0.
1) Un sistem omogen este întotdeauna consistent, deoarece r(A) = r(A|B), există întotdeauna o soluție zero (0, 0, …, 0).
2) Pentru ca un sistem omogen să aibă o soluție diferită de zero, este necesar și suficient ca r = r(A)< n , care este echivalent cu Δ = 0.
3) Dacă r< n , atunci Δ = 0, atunci există necunoscute libere c 1 , c 2 , …, c n-r, sistemul are soluții netriviale și există o infinitate de ele.
4) Soluție generală X la r< n poate fi scris sub formă de matrice după cum urmează:
X \u003d c 1 X 1 + c 2 X 2 + ... + c n-r X n-r,
unde sunt solutiile X 1 , X 2 , …, X n-r formează un sistem fundamental de soluții.
5) Sistemul fundamental de soluții poate fi obținut din soluția generală a sistemului omogen: ,
,
dacă presupunem succesiv valorile parametrilor să fie (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Descompunerea soluției generale în ceea ce privește sistemul fundamental de soluții este o înregistrare a soluției generale ca o combinație liniară de soluții aparținând sistemului fundamental.
Teorema. Pentru ca un sistem de ecuații liniare omogene să aibă o soluție diferită de zero, este necesar și suficient ca Δ ≠ 0.
Deci, dacă determinantul este Δ ≠ 0, atunci sistemul are o soluție unică.
Dacă Δ ≠ 0, atunci sistemul de ecuații liniare omogene are un număr infinit de soluții.
Teorema. Pentru ca un sistem omogen să aibă o soluție diferită de zero, este necesar și suficient ca r(A)< n .
Dovada:
1) r nu poate fi mai mult n(rangul matricei nu depășește numărul de coloane sau rânduri);
2) r< n , deoarece dacă r=n, atunci determinantul principal al sistemului Δ ≠ 0 și, conform formulelor lui Cramer, există o soluție trivială unică x 1 \u003d x 2 \u003d ... \u003d x n \u003d 0, ceea ce contrazice condiția. Mijloace, r(A)< n .
Consecinţă. Pentru un sistem omogen n ecuații liniare cu n necunoscute are o soluție diferită de zero, este necesar și suficient ca Δ = 0.
- dacă sistemul este colaborativ;
- dacă sistemul este compatibil, atunci este definit sau nedefinit (criteriul compatibilității sistemului este determinat de teoremă);
- dacă sistemul este definit, atunci cum să-i găsiți soluția unică (se folosesc metoda Cramer, metoda matricei inverse sau metoda Jordan-Gauss);
- dacă sistemul este incert, cum să descrie setul soluțiilor sale.
Clasificarea sistemelor de ecuații liniare
Un sistem arbitrar de ecuații liniare are forma:a 1 1 x 1 + a 1 2 x 2 + ... + a 1 n x n = b 1
a 2 1 x 1 + a 2 2 x 2 + ... + a 2 n x n = b 2
...................................................
a m 1 x 1 + a m 2 x 2 + ... + a m n x n = b m
- Sisteme de ecuații liniare neomogene (numărul de variabile este egal cu numărul de ecuații, m = n).
- Sisteme arbitrare de ecuații liniare neomogene (m > n sau m< n).
Definiție. Se spune că două sisteme sunt echivalente dacă soluția primului este soluția celui de-al doilea și invers.
Definiție. Un sistem care are cel puțin o soluție este numit comun. Un sistem care nu are nicio soluție se numește inconsistent.
Definiție. Se numește un sistem cu o soluție unică anumit, iar a avea mai multe soluții este nedefinit.
Algoritm pentru rezolvarea sistemelor de ecuații liniare
- Găsiți rangurile matricelor principale și extinse. Dacă nu sunt egali, atunci după teorema Kronecker-Capelli sistemul este inconsecvent și studiul se termină aici.
- Fie rang(A) = rang(B) . Selectăm minorul de bază. În acest caz, toate sistemele necunoscute de ecuații liniare sunt împărțite în două clase. Necunoscutele, ai căror coeficienți sunt incluși în minorul de bază, se numesc dependente, iar necunoscutele, ai căror coeficienți nu sunt incluși în minorul de bază, se numesc libere. Rețineți că alegerea necunoscutelor dependente și libere nu este întotdeauna unică.
- Tăiem acele ecuații ale sistemului ai căror coeficienți nu au fost incluși în minorul de bază, deoarece sunt consecințe ale restului (conform teoremei minorului de bază).
- Termenii ecuațiilor care conțin necunoscute libere vor fi transferați în partea dreaptă. Ca urmare, obținem un sistem de r ecuații cu r necunoscute, echivalent cu cel dat, al cărui determinant este diferit de zero.
- Sistemul rezultat este rezolvat în una din următoarele moduri: metoda Cramer, metoda matricei inverse sau metoda Jordan-Gauss. Se găsesc relaţii care exprimă variabilele dependente în termenii celor libere.
Sistem de m ecuații liniare cu n necunoscute numit un sistem al formei
Unde aijȘi b i (i=1,…,m; b=1,…,n) sunt câteva numere cunoscute și x 1 ,…,x n- necunoscut. În notarea coeficienţilor aij primul indice i denotă numărul ecuației, iar al doilea j este numărul necunoscutului la care se află acest coeficient.
Coeficienții pentru necunoscute se vor scrie sub forma unei matrice  , pe care o vom numi matricea sistemului.
, pe care o vom numi matricea sistemului.
Numerele din partea dreaptă a ecuațiilor b 1 ,…,b m numit membri liberi.
Agregat n numerele c 1 ,…,c n numit decizie a acestui sistem, dacă fiecare ecuație a sistemului devine o egalitate după înlocuirea numerelor în ea c 1 ,…,c nîn locul necunoscutelor corespunzătoare x 1 ,…,x n.
Sarcina noastră va fi să găsim soluții pentru sistem. În acest caz, pot apărea trei situații:
Un sistem de ecuații liniare care are cel puțin o soluție se numește comun. Altfel, i.e. dacă sistemul nu are soluții, atunci se numește incompatibil.
Luați în considerare modalități de a găsi soluții pentru sistem.
METODĂ MATRIXĂ PENTRU REZOLVARE A SISTEMELOR DE ECUAȚII LINARE
Matricele fac posibilă scrierea pe scurt a unui sistem de ecuații liniare. Să fie dat un sistem de 3 ecuații cu trei necunoscute:

Luați în considerare matricea sistemului  și coloane matrice de membri necunoscuți și liberi
și coloane matrice de membri necunoscuți și liberi 
Să găsim produsul

acestea. ca rezultat al produsului, obținem părțile din stânga ecuațiilor acestui sistem. Apoi folosind definiția egalității matriceale acest sistem poate fi scris sub forma
 sau mai scurt A∙X=B.
sau mai scurt A∙X=B.
Aici matrice AȘi B sunt cunoscute, iar matricea X necunoscut. Ea trebuie găsită, pentru că. elementele sale sunt soluția acestui sistem. Această ecuație se numește ecuația matriceală.
Fie determinantul matricei diferit de zero | A| ≠ 0. Atunci ecuația matriceală se rezolvă după cum urmează. Înmulțiți ambele părți ale ecuației din stânga cu matricea A-1, inversul matricei A: . În măsura în care A -1 A = EȘi E∙X=X, apoi obținem soluția ecuației matriceale în forma X = A -1 B .
Rețineți că, deoarece matricea inversă poate fi găsită numai pentru matrice pătrată, metoda matricei poate rezolva numai acele sisteme în care numărul de ecuații este același cu numărul de necunoscute. Cu toate acestea, notația matriceală a sistemului este posibilă și în cazul în care numărul de ecuații nu este egal cu numărul de necunoscute, atunci matricea A nu este pătrat și, prin urmare, este imposibil să găsiți o soluție la sistem în formă X = A -1 B.
Exemple. Rezolvarea sistemelor de ecuații.

REGULA LUI CRAMER
Să considerăm un sistem de 3 ecuații liniare cu trei necunoscute:
Determinant de ordinul trei corespunzător matricei sistemului, i.e. compus din coeficienți la necunoscute,

numit determinant de sistem.
Mai compunem trei determinanti astfel: inlocuim succesiv 1, 2 si 3 coloane in determinantul D cu o coloana de termeni liberi

Apoi putem demonstra următorul rezultat.
Teoremă (regula lui Cramer). Dacă determinantul sistemului este Δ ≠ 0, atunci sistemul luat în considerare are una și o singură soluție și
![]()
Dovada. Deci, luați în considerare un sistem de 3 ecuații cu trei necunoscute. Înmulțiți prima ecuație a sistemului cu complementul algebric A 11 element un 11, a 2-a ecuație - pe A21și al 3-lea - pe A 31:

Să adăugăm aceste ecuații:
Luați în considerare fiecare dintre paranteze și partea dreaptă a acestei ecuații. Prin teorema expansiunii determinantului în ceea ce privește elementele coloanei I
În mod similar, se poate demonstra că și .
În sfârșit, este ușor să vezi asta 
Astfel, obținem egalitatea: .
Prin urmare, .
Egalitățile și sunt derivate în mod similar, de unde urmează afirmația teoremei.
Astfel, observăm că dacă determinantul sistemului este Δ ≠ 0, atunci sistemul are o soluție unică și invers. Dacă determinantul sistemului este egal cu zero, atunci sistemul fie are un set infinit de soluții, fie nu are soluții, adică. incompatibil.
Exemple. Rezolvați un sistem de ecuații

METODA GAUSS
Metodele considerate anterior pot fi folosite pentru a rezolva numai acele sisteme în care numărul de ecuații coincide cu numărul de necunoscute, iar determinantul sistemului trebuie să fie diferit de zero. Metoda Gaussiană este mai universală și este potrivită pentru sisteme cu orice număr de ecuații. Constă în eliminarea succesivă a necunoscutelor din ecuațiile sistemului.
Să considerăm din nou un sistem de trei ecuații cu trei necunoscute:
 .
.
Lăsăm prima ecuație neschimbată, iar din a 2-a și a 3-a excludem termenii care conțin x 1. Pentru a face acest lucru, împărțim a doua ecuație la dar 21 și înmulțiți cu - dar 11 și apoi se adună cu prima ecuație. În mod similar, împărțim a treia ecuație în dar 31 și înmulțiți cu - dar 11 și apoi adăugați-l la primul. Ca rezultat, sistemul original va lua forma:

Acum, din ultima ecuație, eliminăm termenul care conține x2. Pentru a face acest lucru, împărțiți a treia ecuație cu , înmulțiți cu și adăugați-o la a doua. Atunci vom avea un sistem de ecuații:

Prin urmare, din ultima ecuație este ușor de găsit x 3, apoi din a 2-a ecuație x2 si in sfarsit de la 1 - x 1.
Când se utilizează metoda Gaussiană, ecuațiile pot fi schimbate dacă este necesar.
De multe ori, în loc să scrie sistem nou ecuațiile sunt limitate la scrierea matricei extinse a sistemului:

și apoi aduceți-o într-o formă triunghiulară sau diagonală folosind transformări elementare.
LA transformări elementare matricele includ următoarele transformări:
- permutarea rândurilor sau coloanelor;
- înmulțirea unui șir cu un număr diferit de zero;
- adăugând la o linie alte linii.
Exemple: Rezolvați sisteme de ecuații folosind metoda Gauss.

Astfel, sistemul are un număr infinit de soluții.
Sistemele de ecuații sunt utilizate pe scară largă în industria economică în modelarea matematică a diferitelor procese. De exemplu, la rezolvarea problemelor de management și planificare a producției, rute logistice (problema de transport) sau amplasarea echipamentelor.
Sistemele de ecuații sunt utilizate nu numai în domeniul matematicii, ci și în fizică, chimie și biologie, atunci când se rezolvă probleme de găsire a mărimii populației.
Un sistem de ecuații liniare este un termen pentru două sau mai multe ecuații cu mai multe variabile pentru care este necesar să se găsească o soluție comună. O astfel de succesiune de numere pentru care toate ecuațiile devin egalități adevărate sau dovedesc că șirul nu există.
Ecuație liniară
Ecuațiile de forma ax+by=c se numesc liniare. Denumirile x, y sunt necunoscutele, a căror valoare trebuie găsită, b, a sunt coeficienții variabilelor, c este termenul liber al ecuației.
Rezolvarea ecuației prin reprezentarea graficului acesteia va arăta ca o dreaptă, toate punctele căreia sunt soluția polinomului.
Tipuri de sisteme de ecuații liniare
Cele mai simple sunt exemplele de sisteme de ecuații liniare cu două variabile X și Y.
F1(x, y) = 0 și F2(x, y) = 0, unde F1,2 sunt funcții și (x, y) sunt variabile de funcție.
Rezolvați un sistem de ecuații - înseamnă să găsești astfel de valori (x, y) la care sistemul se transformă într-o egalitate adevărată sau să stabilești asta valori adecvate x și y nu există.
O pereche de valori (x, y), scrisă ca coordonate punctuale, se numește soluție a unui sistem de ecuații liniare.
Dacă sistemele au o soluție comună sau nu există nicio soluție, se numesc echivalente.
Sistemele omogene de ecuații liniare sunt sisteme a căror latură dreaptă este egală cu zero. Dacă partea dreaptă după semnul „egal” are o valoare sau este exprimată printr-o funcție, un astfel de sistem nu este omogen.
Numărul de variabile poate fi mult mai mare de două, atunci ar trebui să vorbim despre un exemplu de sistem de ecuații liniare cu trei sau mai multe variabile.
În fața sistemelor, școlarii presupun că numărul de ecuații trebuie să coincidă neapărat cu numărul de necunoscute, dar nu este așa. Numărul de ecuații din sistem nu depinde de variabile, poate exista un număr arbitrar de mare al acestora.
Metode simple și complexe de rezolvare a sistemelor de ecuații
Nu există o modalitate analitică generală de a rezolva astfel de sisteme, toate metodele se bazează pe soluții numerice. Cursul de matematică școlar descrie în detaliu metode precum permutarea, adunarea algebrică, substituția, precum și metoda grafică și matriceală, soluția prin metoda Gauss.
Sarcina principală în predarea metodelor de rezolvare este de a preda cum să analizăm corect sistemul și să găsim algoritm optim soluții pentru fiecare exemplu. Principalul lucru nu este să memorați un sistem de reguli și acțiuni pentru fiecare metodă, ci să înțelegeți principiile aplicării unei anumite metode.
Rezolvarea exemplelor de sisteme de ecuații liniare din clasa a VII-a a programului școală gimnazială destul de simplu și explicat în detaliu. În orice manual de matematică, acestei secțiuni i se acordă suficientă atenție. Rezolvarea exemplelor de sisteme de ecuații liniare prin metoda lui Gauss și Cramer este studiată mai detaliat în primele cursuri ale instituțiilor de învățământ superior.
Rezolvarea sistemelor prin metoda substituției
Acțiunile metodei substituției au ca scop exprimarea valorii unei variabile prin a doua. Expresia este substituită în ecuația rămasă, apoi este redusă la o singură formă variabilă. Acțiunea se repetă în funcție de numărul de necunoscute din sistem
Să dăm un exemplu de sistem de ecuații liniare din clasa a 7-a prin metoda substituției:

După cum se poate observa din exemplu, variabila x a fost exprimată prin F(X) = 7 + Y. Expresia rezultată, substituită în ecuația a 2-a a sistemului în locul lui X, a ajutat la obținerea unei variabile Y în ecuația a 2-a. . Soluția acestui exemplu nu provoacă dificultăți și vă permite să obțineți valoarea Y. Ultimul pas este verificarea valorilor obținute.
Nu este întotdeauna posibil să se rezolve un exemplu de sistem de ecuații liniare prin substituție. Ecuațiile pot fi complexe și expresia variabilei în termenii celei de-a doua necunoscute va fi prea greoaie pentru calcule ulterioare. Când există mai mult de 3 necunoscute în sistem, soluția de substituție este, de asemenea, nepractică.
Rezolvarea unui exemplu de sistem de ecuații liniare neomogene:

Rezolvare folosind adunarea algebrică
Când se caută o soluție pentru sisteme prin metoda adunării, adunarea termen cu termen și înmulțirea ecuațiilor cu diverse numere. Scopul final al operațiilor matematice este o ecuație cu o variabilă.

Aplicațiile acestei metode necesită practică și observație. Nu este ușor să rezolvi un sistem de ecuații liniare folosind metoda adunării cu numărul de variabile 3 sau mai mult. Adunarea algebrică este utilă atunci când ecuațiile conțin fracții și numere zecimale.
Algoritm de acțiune a soluției:
- Înmulțiți ambele părți ale ecuației cu un număr. Ca rezultat operație aritmetică unul dintre coeficienții variabilei trebuie să devină egal cu 1.
- Adăugați expresia rezultată termen cu termen și găsiți una dintre necunoscute.
- Înlocuiți valoarea rezultată în a doua ecuație a sistemului pentru a găsi variabila rămasă.
Metoda de rezolvare prin introducerea unei noi variabile
O nouă variabilă poate fi introdusă dacă sistemul trebuie să găsească o soluție pentru nu mai mult de două ecuații, numărul de necunoscute ar trebui, de asemenea, să nu fie mai mare de două.
Metoda este folosită pentru a simplifica una dintre ecuații prin introducerea unei noi variabile. Noua ecuație este rezolvată în raport cu necunoscuta introdusă, iar valoarea rezultată este utilizată pentru a determina variabila inițială.
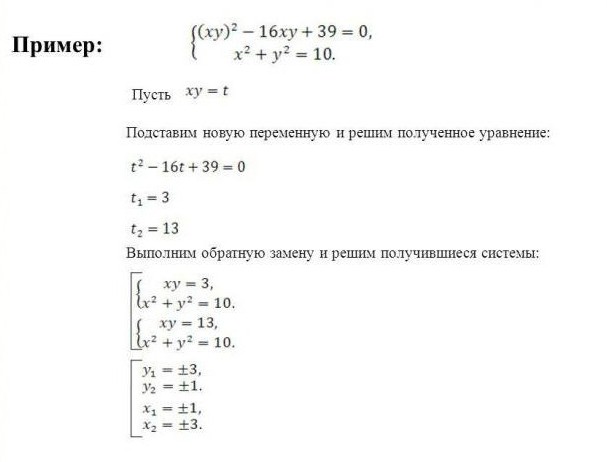
Exemplul arată că prin introducerea unei noi variabile t a fost posibilă reducerea primei ecuații a sistemului la standard. trinom pătrat. Puteți rezolva un polinom găsind discriminantul.
Este necesar să se găsească valoarea discriminantului prin formula binecunoscuta: D = b2 - 4*a*c, unde D este discriminantul dorit, b, a, c sunt multiplicatorii polinomului. În exemplul dat, a=1, b=16, c=39, deci D=100. Dacă discriminantul este mai mare decât zero, atunci există două soluții: t = -b±√D / 2*a, dacă discriminantul este mai mic decât zero, atunci există o singură soluție: x= -b / 2*a.
Soluția pentru sistemele rezultate se găsește prin metoda adunării.
O metodă vizuală pentru rezolvarea sistemelor
Potrivit pentru sisteme cu 3 ecuații. Metoda constă în trasarea graficelor fiecărei ecuații incluse în sistem pe axa de coordonate. Coordonatele punctelor de intersecție ale curbelor vor fi soluția generală a sistemului.
Metoda grafică are o serie de nuanțe. Luați în considerare câteva exemple de rezolvare vizuală a sistemelor de ecuații liniare.

După cum se poate observa din exemplu, s-au construit două puncte pentru fiecare linie, valorile variabilei x au fost alese în mod arbitrar: 0 și 3. Pe baza valorilor lui x, s-au găsit valorile pentru y: 3 și 0. Punctele cu coordonatele (0, 3) și (3, 0) au fost marcate pe grafic și legate printr-o linie.
Pașii trebuie repetați pentru a doua ecuație. Punctul de intersecție al dreptelor este soluția sistemului.
În exemplul următor, este necesară găsirea unei soluții grafice a sistemului de ecuații liniare: 0,5x-y+2=0 și 0,5x-y-1=0.

După cum se poate observa din exemplu, sistemul nu are soluție, deoarece graficele sunt paralele și nu se intersectează pe toată lungimea lor.

Sistemele din exemplele 2 și 3 sunt similare, dar atunci când sunt construite, devine evident că soluțiile lor sunt diferite. Trebuie amintit că nu se poate spune întotdeauna dacă sistemul are o soluție sau nu, este întotdeauna necesar să se construiască un grafic.
Matrix și soiurile sale
Matricele sunt folosite pentru a scrie pe scurt un sistem de ecuații liniare. O matrice este un tip special de tabel plin cu numere. n*m are n - rânduri și m - coloane.
O matrice este pătrată atunci când numărul de coloane și rânduri este egal. Un vector-matrice este o matrice cu o singură coloană cu un număr infinit posibil de rânduri. O matrice cu unități de-a lungul uneia dintre diagonale și alte elemente zero se numește identitate.
O matrice inversă este o astfel de matrice, atunci când este înmulțită cu care cea originală se transformă într-una unitară, o astfel de matrice există doar pentru cea pătrată originală.
Reguli pentru transformarea unui sistem de ecuații într-o matrice
În ceea ce privește sistemele de ecuații, coeficienții și membrii liberi ai ecuațiilor sunt scrise ca numere ale matricei, o ecuație este un rând al matricei.
Un rând de matrice este numit diferit de zero dacă cel puțin un element al rândului nu este egal cu zero. Prin urmare, dacă în oricare dintre ecuații numărul de variabile diferă, atunci este necesar să introduceți zero în locul necunoscutului lipsă.
Coloanele matricei trebuie să corespundă strict variabilelor. Aceasta înseamnă că coeficienții variabilei x pot fi scriși doar într-o coloană, de exemplu prima, coeficientul necunoscutului y - doar în a doua.
La înmulțirea unei matrice, toate elementele matricei sunt înmulțite succesiv cu un număr.
Opțiuni pentru găsirea matricei inverse
Formula pentru găsirea matricei inverse este destul de simplă: K -1 = 1 / |K|, unde K -1 este matricea inversă și |K| - determinant matriceal. |K| nu trebuie să fie egal cu zero, atunci sistemul are o soluție.
Determinantul este ușor de calculat pentru o matrice două câte două, este necesar doar să înmulțim elementele în diagonală între ele. Pentru opțiunea „trei cu trei”, există o formulă |K|=a 1 b 2 c 3 + a 1 b 3 c 2 + a 3 b 1 c 2 + a 2 b 3 c 1 + a 2 b 1 c 3 + a 3 b 2 c 1 . Puteți folosi formula sau vă puteți aminti că trebuie să luați câte un element din fiecare rând și fiecare coloană, astfel încât numerele coloanei și rândurilor elementelor să nu se repete în produs.
Rezolvarea exemplelor de sisteme de ecuații liniare prin metoda matricei
Metoda matriceală de găsire a unei soluții face posibilă reducerea notațiilor greoaie la rezolvarea sistemelor cu o cantitate mare variabile și ecuații.

În exemplu, a nm sunt coeficienții ecuațiilor, matricea este un vector x n sunt variabilele, iar b n sunt termenii liberi.


Rezolvarea sistemelor prin metoda Gauss
În matematica superioară, metoda Gauss este studiată împreună cu metoda Cramer, iar procesul de găsire a unei soluții la sisteme se numește metoda Gauss-Cramer de rezolvare. Aceste metode sunt folosite pentru a găsi variabilele sistemelor cu un număr mare de ecuații liniare.
Metoda Gaussiană este foarte asemănătoare cu soluțiile de substituție și adiție algebrică, dar este mai sistematică. În cursul școlii, soluția Gauss este folosită pentru sistemele cu 3 și 4 ecuații. Scopul metodei este de a aduce sistemul la forma unui trapez inversat. Prin transformări și substituții algebrice, valoarea unei variabile se găsește într-una din ecuațiile sistemului. A doua ecuație este o expresie cu 2 necunoscute și 3 și 4 - cu 3 și, respectiv, 4 variabile.
După aducerea sistemului la forma descrisă, soluția ulterioară este redusă la înlocuirea secvențială a variabilelor cunoscute în ecuațiile sistemului.
În manualele școlare pentru clasa a 7-a, un exemplu de soluție Gauss este descris după cum urmează:

După cum se poate observa din exemplu, la pasul (3) s-au obținut două ecuații 3x 3 -2x 4 =11 și 3x 3 +2x 4 =7. Rezolvarea oricăreia dintre ecuații vă va permite să aflați una dintre variabilele x n.

Teorema 5, care este menționată în text, afirmă că dacă una dintre ecuațiile sistemului este înlocuită cu una echivalentă, atunci și sistemul rezultat va fi echivalent cu cel original.
Metoda Gauss este greu de înțeles de către elevi liceu, dar este una dintre cele mai multe moduri interesante să dezvolte ingeniozitatea copiilor înscriși în programul de studii avansate la orele de matematică și fizică.
Pentru ușurința înregistrării calculelor, este obișnuit să faceți următoarele:

Coeficienții ecuației și termenii liberi se scriu sub forma unei matrice, unde fiecare rând al matricei corespunde uneia dintre ecuațiile sistemului. separă partea stângă a ecuației de partea dreaptă. Numerele romane denotă numerele de ecuații din sistem.
În primul rând, notează matricea cu care să lucreze, apoi toate acțiunile efectuate cu unul dintre rânduri. Matricea rezultată se scrie după semnul „săgeată” și se continuă operațiile algebrice necesare până la obținerea rezultatului.
Ca rezultat, ar trebui să se obțină o matrice în care una dintre diagonale este 1 și toți ceilalți coeficienți sunt egali cu zero, adică matricea este redusă la o singură formă. Nu trebuie să uităm să facem calcule cu numerele ambelor părți ale ecuației.
Această notație este mai puțin greoaie și vă permite să nu fiți distras prin enumerarea numeroaselor necunoscute.
Aplicarea gratuită a oricărei metode de soluție va necesita îngrijire și o anumită experiență. Nu toate metodele sunt aplicate. Unele moduri de a găsi soluții sunt mai preferabile într-un anumit domeniu al activității umane, în timp ce altele există în scopul învățării.
Recomandăm și noi
 Sursă de alimentare comutată: reparație și perfecționare
Sursă de alimentare comutată: reparație și perfecționare
 Telecomanda luminii
Telecomanda luminii
 Lecții de înot pentru copii preșcolari
Lecții de înot pentru copii preșcolari
 Note pentru master - alarme de uz casnic
Note pentru master - alarme de uz casnic
 Elice de ceas pe Atmega8
Elice de ceas pe Atmega8
 Exemple de aplicații pentru dispozitive și relee, cum să alegeți și să conectați corect un releu Microcontroler și circuite simple de comutare a releului
Exemple de aplicații pentru dispozitive și relee, cum să alegeți și să conectați corect un releu Microcontroler și circuite simple de comutare a releului