Najpierw inercyjne układy odniesienia. Jakie układy odniesienia nazywamy inercjami? Przykłady inercjalnego układu odniesienia
Pierwsze prawo Newtona postuluje występowanie takiego zjawiska, jak bezwładność ciał. Dlatego jest również znane jako Prawo Bezwładności. Bezwładność - jest to zjawisko polegające na utrzymywaniu przez ciało prędkości ruchu (zarówno co do wielkości, jak i kierunku), gdy na ciało nie działają żadne siły. Aby zmienić prędkość ruchu, konieczne jest oddziaływanie na ciało z pewną siłą. Oczywiście wynik działania sił tej samej wielkości na różne ciała będzie inny. Dlatego mówi się, że ciała mają bezwładność. Bezwładność jest właściwością ciał, która opiera się zmianie ich obecnego stanu. Wartość bezwładności charakteryzuje masa ciała.
Inercyjny układ odniesienia
Pierwsze prawo Newtona stwierdza (które można zweryfikować doświadczalnie z różnym stopniem dokładności), że układy inercyjne rzeczywiście istnieją. To prawo mechaniki stawia bezwładnościowe układy odniesienia na szczególnej, uprzywilejowanej pozycji.
Układy odniesienia, w których spełnione jest pierwsze prawo Newtona, nazywane są inercjalnymi.
Systemy inercyjne odniesienie- są to układy, względem których punkt materialny, przy braku zewnętrznych wpływów na niego lub ich wzajemnej kompensacji, znajduje się w spoczynku lub porusza się jednostajnie i prostoliniowo.
Istnieje nieskończona liczba systemów inercyjnych. Układ odniesienia związany z pociągiem poruszającym się ze stałą prędkością wzdłuż prostego odcinka toru jest również układem inercyjnym (w przybliżeniu), podobnie jak układ związany z Ziemią. Wszystkie inercyjne układy odniesienia tworzą klasę układów, które poruszają się względem siebie jednostajnie i prostoliniowo. Przyspieszenia dowolnego ciała w różnych układach bezwładnościowych są takie same.
Jak ustawić co ten system odniesienie jest bezwładne? Można to zrobić tylko dzięki doświadczeniu. Obserwacje pokazują, że układ heliocentryczny z bardzo dużą dokładnością może być traktowany jako układ inercjalny, w którym początek współrzędnych jest powiązany ze Słońcem, a osie są skierowane na pewne „stałe” gwiazdy. Układy odniesienia sztywno związane z powierzchnią Ziemi, ściśle mówiąc, nie są inercyjne, ponieważ Ziemia porusza się po orbicie wokół Słońca i jednocześnie obraca się wokół własnej osi. Jednak opisując ruchy, które nie mają skali globalnej (tj. światowej), układy odniesienia związane z Ziemią można uznać za bezwładnościowe z wystarczającą dokładnością.
Układy odniesienia są również inercyjne, jeśli poruszają się jednostajnie i prostoliniowo względem dowolnego układu inercjalnego.
Galileusz ustalił, że nie jest możliwe ustalenie, czy układ ten jest w spoczynku, czy porusza się jednostajnie i prostoliniowo, za pomocą jakichkolwiek mechanicznych eksperymentów osadzonych w inercjalnym układzie odniesienia. To stwierdzenie nazywa się zasadą względności Galileusza lub mechaniczną zasadą względności.
Zasada ta została następnie rozwinięta przez A. Einsteina i jest jednym z postulatów szczególnej teorii względności. Inercyjne układy odniesienia odgrywają w fizyce niezwykle ważną rolę, ponieważ zgodnie z zasadą względności Einsteina matematyczne wyrażenie dowolnego prawa fizyki ma tę samą postać w każdym inercyjnym układzie odniesienia. W przyszłości będziemy korzystać wyłącznie z systemów inercyjnych (nie wspominając o tym za każdym razem).
Układy odniesienia, w których nie jest spełnione pierwsze prawo Newtona, nazywamy nieinercjalnymi.
Takie systemy obejmują dowolny układ odniesienia poruszający się z przyspieszeniem względem bezwładnościowego układu odniesienia.
W mechanice Newtona prawa oddziaływania ciał formułowane są dla klasy inercjalnych układów odniesienia.
Przykładem eksperymentu mechanicznego, w którym manifestuje się nieinercyjność układu związanego z Ziemią, jest zachowanie się wahadła Foucaulta. Jest to nazwa masywnej kuli zawieszonej na wystarczająco długiej nitce i wykonującej niewielkie oscylacje wokół położenia równowagi. Gdyby układ połączony z Ziemią był inercyjny, płaszczyzna drgań wahadła Foucaulta pozostałaby niezmieniona względem Ziemi. W rzeczywistości płaszczyzna kołysania wahadła obraca się pod wpływem obrotu Ziemi, a rzut trajektorii wahadła na powierzchnię Ziemi wygląda jak rozeta (rys. 1).
O tym, że ciało nie ma tendencji do zachowywania żadnego ruchu, mianowicie prostoliniowego, świadczy na przykład następujący eksperyment (ryc. 2). Piłka poruszająca się w linii prostej po płaskiej poziomej powierzchni, zderzając się z przeszkodą o krzywoliniowym kształcie, jest zmuszona do poruszania się po łuku pod wpływem tej przeszkody. Jednak gdy piłka dotrze do krawędzi przeszkody, przestaje poruszać się krzywoliniowo i ponownie zaczyna poruszać się po linii prostej. Podsumowując wyniki powyższych (i podobnych) obserwacji, możemy stwierdzić, że jeśli na dane ciało nie wpływają inne ciała lub ich działania są wzajemnie kompensowane, to ciało to znajduje się w spoczynku lub jego prędkość pozostaje niezmieniona względem układu odniesienia trwale związane z powierzchnią Ziemi.
Pytanie #6:
Można się obawiać, że większość czytelników jest już znudzona teoretycznym rozumowaniem i będzie domagać się podania konkretny przykład układ inercyjny w przyrodzie. Spróbujmy w miarę możliwości spełnić ich życzenie. Rozważmy konkretny przykład: czy LTT jest układem inercjalnym Ziemi? Każdy uczeń powie na to: „Wszystkie przykłady, które nauczyciel fizyki podaje na lekcji, wyjaśniając prawa Newtona, odnoszą się do ruchu ciał na Ziemi. Rozumiem to w taki sposób, że ruchy wszystkich ciał na Ziemi odbywają się zgodnie z prawami Newtona. Dlatego Ziemia jest systemem inercyjnym.”
Jednak ten wniosek nie jest trafny. Aby to zobaczyć, przenieśmy się mentalnie do Panteonu Paryskiego, gdzie w 1851 roku Leon Foucault, członek Francuskiej Akademii Nauk, demonstrował swoje słynne doświadczenie.
Z kopuły Panteonu zawieszony jest 67-metrowy kabel, do którego przymocowany jest miedziany odważnik o wadze 28 kg. To gigantyczne wahadło będzie się kołysać. Po kilku oscylacjach ujawnia się niesamowite zjawisko: płaszczyzna, w której wahadło się waha, zaczyna powoli się obracać. Czemu? Foucault wyjaśnił wynik eksperymentu obrotem Ziemi wokół własnej osi. Ziemia się obraca, ale płaszczyzna wychylenia wahadła się nie zmienia - prowadzi to do obrotu płaszczyzny oscylacji wahadła względem powierzchni ziemi. W pełni zgadzamy się z tym wyjaśnieniem, tylko trochę inaczej wyrazimy: Ziemia nie jest układem inercjalnym. Płaszczyzna oscylacji wahadła obraca się względem Ziemi, ale nie można znaleźć żadnego ciała, które byłoby źródłem siły wywołującej ten obrót. W tym przypadku przyspieszenie (obrót odnosi się do ruchów przyspieszonych) następuje bez wpływu rzeczywistej siły. W układach inercjalnych, gdzie obowiązują prawa Newtona, takie zjawiska są niemożliwe.
Ziemię można uznać za układ inercyjny tylko w przybliżeniu; innymi słowy, możemy uznać Ziemię za układ inercyjny tylko po to, by opisać takie procesy, na które jej obrót praktycznie nie ma zauważalnego wpływu. Zdecydowana większość zjawisk, które otaczają nas swoją naturą, jest właśnie taka. Dlatego w życiu praktycznym możemy bezpiecznie zastosować prawa Newtona do ruchów na Ziemi.
To, że Ziemia nie jest układem inercyjnym, potwierdzają inne zjawiska. W 1802 r. przeprowadzono eksperyment w Hamburgu, w którym z wysokości 76 m ciężkie ciało upadło na ziemię. Okazało się, że ciało nie spadło dokładnie w kierunku działającej na nie siły grawitacji, ale odchyliło się o prawie 1 cm na wschód. Można to wytłumaczyć jedynie faktem, że Ziemia jest układem nieinercyjnym.
W 1857 r. rosyjski akademik Karl Baer ustanowił znane prawo erozji brzegów rzeki: dla rzek płynących wzdłuż południka na półkuli północnej prawy brzeg jest wysoki, a lewy niski, na półkuli południowej na półkuli południowej. przeciwnie, lewy brzeg jest wysoki, a prawy niski. Ten wzór jest szczególnie wyraźny w dużych rzekach. Wysoki prawy brzeg mają Nil, Ob, Irtysz, Lena, Wołga, Dunaj, Dniepr, Don itp. Lewy brzeg jest wyższy niż prawy brzeg w pobliżu takich rzek półkuli południowej jak Parana i Paragwaj. Można to wytłumaczyć jedynie faktem, że wody rzek płynących wzdłuż południków na półkuli północnej przesuwają się w prawo (odpowiednio na półkuli południowej w lewo), zmywając prawy brzeg i lewy brzeg, uformowany z umytego piasku, staje się pochyły.
Dlaczego rzeki płynące wzdłuż południka miałyby zbaczać na bok? Z tego samego powodu, dla którego obraca się płaszczyzna wahadła i odchyla się swobodnie spadające ciało. Geograf odpowie, że wszystkie te zjawiska są spowodowane obrotem Ziemi wokół własnej osi. Fizyk wyjaśni, że wyraża to brak bezwładności Ziemi jako ciała odniesienia. Ziemia obraca się względem układów bezwładnościowych.
Znalezienie układu inercjalnego w zasadzie nie jest trudne: wystarczy znaleźć układ odniesienia, w którym dokładnie obowiązują prawa Newtona. W praktyce jednak wcale nie jest to takie proste. Układem inercyjnym może być tylko układ związany z ciałem swobodnym. W naturze, jak już wspomniano, nie wolne ciała; wszystkie ciała oddziałują z innymi ciałami, chociaż ta interakcja może być dowolnie mała. Nie da się zatem wskazać w przyrodzie konkretnego układu inercjalnego, ale zawsze można znaleźć układ, który badając dany problem, można z wystarczającą dokładnością do praktyki uznać za inercyjny. żądany system należy zawsze dobierać tak, aby zjawiska ze względu na jej nieinercyjność były mniejsze od błędu zastosowanego urządzenia pomiarowe. Jak już zauważyliśmy, opisując „większość ruchy ziemi naszą planetę można z powodzeniem uznać za układ inercyjny. W eksperymencie Foucaulta, podobnie jak w badaniu ruchu Ziemi, układ inercyjny powinien być powiązany ze Słońcem. Ruch Słońca można opisać w układzie inercjalnym powiązanym z otaczającymi go gwiazdami (zakłada się, że gwiazdy są praktycznie nieruchome), a badając rotację Galaktyki, należy powiązać układ inercyjny ze środkiem masy Galaktyka.
Przedstawiamy Państwu lekcję wideo poświęconą tematowi „Inercyjne układy odniesienia. Pierwsze prawo Newtona, które jest zawarte w szkolnym kursie fizyki dla klasy 9. Na początku lekcji nauczyciel przypomni Ci o znaczeniu wybranego układu odniesienia. A potem opowie o poprawności i cechach wybranego układu odniesienia, a także wyjaśni termin „bezwładność”.
W poprzedniej lekcji mówiliśmy o znaczeniu wyboru układu odniesienia. Przypomnijmy, że trajektoria, przebyta odległość i prędkość będą zależeć od tego, jak wybierzemy CO. Istnieje szereg innych cech związanych z wyborem systemu referencyjnego, o których porozmawiamy.

Ryż. 1. Zależność trajektorii spadku obciążenia od wyboru układu odniesienia
W siódmej klasie studiowałeś pojęcia „bezwładności” i „bezwładności”.
Bezwładność - to jest zjawisko, w której organizm dąży do zachowania swojego pierwotnego stanu. Jeśli ciało się poruszało, powinno dążyć do utrzymania prędkości tego ruchu. A jeśli jest w spoczynku, będzie się starał utrzymać swój stan spoczynku.
bezwładność - to jest własność ciało, aby utrzymać stan ruchu. Własność bezwładności charakteryzuje się taką wielkością jak masa. Waga – miara bezwładności ciała. Im cięższe ciało, tym trudniej się poruszyć lub odwrotnie, zatrzymać.
Należy pamiętać, że te pojęcia są bezpośrednio związane z pojęciem „ inercyjna rama odniesienia» (ISO), które zostaną omówione poniżej.
Rozważ ruch ciała (lub stan spoczynku), jeśli na ciało nie działają żadne inne ciała. Wniosek dotyczący zachowania ciała w przypadku braku działania innych ciał został po raz pierwszy zaproponowany przez Rene Descartes (ryc. 2) i kontynuowany w eksperymentach Galileusza (ryc. 3).

Ryż. 2. René Kartezjusz

Ryż. 3. Galileo Galilei
Jeśli ciało się porusza i żadne inne ciała na niego nie działają, to ruch zostanie zachowany, pozostanie prostoliniowy i jednolity. Jeśli inne ciała nie działają na ciało, a ciało jest w spoczynku, to stan spoczynku zostanie zachowany. Wiadomo jednak, że stan spoczynku jest związany z układem odniesienia: w jednym FR ciało jest w spoczynku, w innym porusza się całkiem skutecznie i szybko. Wyniki eksperymentów i rozumowania prowadzą do wniosku, że nie we wszystkich układach odniesienia ciało będzie poruszało się w linii prostej i jednostajnie lub będzie w spoczynku przy braku innych ciał działających na nie.
W związku z tym, aby rozwiązać główny problem mechaniki, ważny jest wybór takiego systemu raportowania, w którym mimo wszystko spełnione jest prawo bezwładności, gdzie przyczyna, która spowodowała zmianę ruchu ciała, jest jasna. Jeżeli ciało porusza się w linii prostej i jednostajnie przy braku działania innych ciał, taki układ odniesienia będzie dla nas preferowany i będzie się nazywał inercyjny układ odniesienia(ISO).
Arystotelesowski punkt widzenia na przyczynę ruchu
Inercyjny układ odniesienia jest wygodnym modelem do opisu ruchu ciała i przyczyn, które go powodują. Po raz pierwszy koncepcja ta pojawiła się dzięki Isaacowi Newtonowi (ryc. 5).

Ryż. 5. Izaak Newton (1643-1727)
Starożytni Grecy wyobrażali sobie ruch w zupełnie inny sposób. Zapoznamy się z Arystotelesowskim punktem widzenia na ruch (ryc. 6).

Ryż. 6. Arystoteles
Według Arystotelesa istnieje tylko jeden inercyjny układ odniesienia – układ odniesienia związany z Ziemią. Wszystkie inne systemy odniesienia, według Arystotelesa, są wtórne. W związku z tym wszystkie ruchy można podzielić na dwa typy: 1) naturalne, czyli te, o których informuje Ziemia; 2) wymuszone, czyli cała reszta.
Najprostszym przykładem naturalnego ruchu jest swobodny spadek ciała na Ziemię, ponieważ w tym przypadku Ziemia nadaje ciału prędkość.
Rozważ przykład wymuszonego ruchu. Tak wygląda sytuacja, gdy koń ciągnie wóz. Dopóki koń wywiera siłę, wóz porusza się (ryc. 7). Gdy tylko koń się zatrzymał, zatrzymał się również wóz. Brak mocy, brak prędkości. Według Arystotelesa to siła wyjaśnia obecność prędkości w ciele.

Ryż. 7. Ruch wymuszony
Do tej pory niektórzy zwykli ludzie uważają punkt widzenia Arystotelesa za sprawiedliwy. Na przykład pułkownik Friedrich Kraus von Zillergut z Przygód dobrego żołnierza Szwejka podczas wojny światowej próbował zilustrować zasadę „Brak mocy – brak prędkości”: „Kiedy cała benzyna wypłynęła”, powiedział pułkownik, „samochód był zmuszony do zatrzymania. To właśnie widziałem wczoraj. A potem nadal mówią o bezwładności, panowie. Nie idzie, stoi, nie rusza się z miejsca. Bez benzyny! Cóż, czy to nie zabawne?
Podobnie jak w nowoczesnym showbiznesie, gdzie są fani, zawsze będą krytycy. Arystoteles miał też swoich krytyków. Zaproponowali, aby wykonał następujący eksperyment: puść ciało, a spadnie ono dokładnie pod miejsce, w którym je puścimy. Podajmy przykład krytyki teorii Arystotelesa, podobny do przykładów jemu współczesnych. Wyobraź sobie, że lecący samolot zrzuca bombę (rys. 8). Czy bomba spadnie dokładnie pod miejsce, w którym ją zrzuciliśmy?

Ryż. 8. Ilustracja na przykład
Oczywiście nie. Ale w końcu jest to ruch naturalny – ruch, o którym poinformowała Ziemia. Co zatem sprawia, że ta bomba porusza się coraz dalej? Arystoteles odpowiedział w ten sposób: faktem jest, że naturalny ruch, o którym informuje Ziemia, to upadek prosto w dół. Ale kiedy porusza się w powietrzu, bomba jest porywana przez jej turbulencje, a te turbulencje niejako popychają bombę do przodu.
Co się stanie, jeśli powietrze zostanie usunięte i powstanie próżnia? W końcu, jeśli nie ma powietrza, to według Arystotelesa bomba powinna spaść dokładnie pod miejsce, w którym została rzucona. Arystoteles przekonywał, że jeśli nie ma powietrza, to taka sytuacja jest możliwa, ale w rzeczywistości nie ma pustki w naturze, nie ma próżni. A jeśli nie ma próżni, nie ma problemu.
I tylko Galileo Galilei sformułował zasadę bezwładności w postaci, do której jesteśmy przyzwyczajeni. Powodem zmiany prędkości jest wpływ innych ciał na organizm. Jeśli inne ciała nie działają na ciało lub to działanie jest kompensowane, to prędkość ciała nie ulegnie zmianie.
Możemy dokonać następującego rozumowania dotyczącego inercjalnego układu odniesienia. Wyobraźmy sobie sytuację, w której samochód jedzie, następnie kierowca wyłącza silnik, a następnie samochód porusza się bezwładnie (rys. 9). Ale jest to błędne stwierdzenie z tego prostego powodu, że z czasem samochód zatrzyma się w wyniku siły tarcia. Dlatego w tym przypadku nie będzie ruch jednostajny- brakuje jednego z warunków.

Ryż. 9. Prędkość samochodu zmienia się w wyniku siły tarcia
Rozważ inny przypadek: duży, duży ciągnik porusza się ze stałą prędkością, a przed nim ciągnie duży ładunek z łyżką. Taki ruch można uznać za prostoliniowy i równomierny, ponieważ w tym przypadku wszystkie siły działające na ciało są kompensowane i równoważą się (ryc. 10). Stąd układ odniesienia związany z tym ciałem możemy uznać za inercyjny.

Ryż. 10. Ciągnik porusza się równo iw linii prostej. Działanie wszystkich ciał jest kompensowane
Układów inercjalnych może być wiele. W rzeczywistości jednak taki układ odniesienia jest nadal wyidealizowany, gdyż przy bliższym przyjrzeniu się takim układom odniesienia w pełnym tego słowa znaczeniu nie ma. ISO to rodzaj idealizacji, która pozwala skutecznie symulować rzeczywiste procesy fizyczne.
W przypadku bezwładnościowych układów odniesienia obowiązuje wzór Galileo na sumowanie prędkości. Zauważ też, że wszystkie układy odniesienia, o których mówiliśmy wcześniej, można w pewnym przybliżeniu uznać za inercyjne.
Isaac Newton jako pierwszy sformułował prawo dedykowane ISO. Zasługa Newtona polega na tym, że jako pierwszy naukowo wykazał, że prędkość poruszającego się ciała nie zmienia się natychmiast, ale w wyniku jakiegoś działania w czasie. Fakt ten stanowił podstawę do stworzenia prawa, które nazywamy pierwszym prawem Newtona.
Pierwsze prawo Newtona : istnieją układy odniesienia, w których ciało porusza się w linii prostej i jednostajnie lub pozostaje w spoczynku, jeśli na ciało nie działają żadne siły lub wszystkie siły działające na ciało są skompensowane. Takie układy odniesienia nazywane są inercjami.
W inny sposób mówią czasem tak: inercyjny układ odniesienia to układ, w którym spełnione są prawa Newtona.
Dlaczego Ziemia jest nieinercyjnym CO. Wahadło Foucaulta
W w dużych ilościach problemów, konieczne jest rozważenie ruchu ciała względem Ziemi, podczas gdy Ziemię uważamy za inercyjny układ odniesienia. Okazuje się, że to stwierdzenie nie zawsze jest prawdziwe. Jeśli weźmiemy pod uwagę ruch Ziemi względem jej osi lub względem gwiazd, to ruch ten odbywa się z pewnym przyspieszeniem. SO, który porusza się z pewnym przyspieszeniem, nie może być uważany za inercyjny w pełnym tego słowa znaczeniu.
Ziemia obraca się wokół własnej osi, co oznacza, że wszystkie punkty leżące na jej powierzchni nieustannie zmieniają kierunek swojej prędkości. Prędkość jest wielkością wektorową. Jeśli zmienia się jego kierunek, pojawia się pewne przyspieszenie. Dlatego Ziemia nie może być poprawnym ISO. Jeśli obliczymy to przyspieszenie dla punktów znajdujących się na równiku (punktów, które mają maksymalne przyspieszenie względem punktów bliższych biegunom), to jego wartość wyniesie . Indeks pokazuje, że przyspieszenie jest dośrodkowe. W porównaniu do przyspieszenia swobodny spadek przyspieszenie można pominąć, a Ziemię można uznać za inercyjny układ odniesienia.
Jednak podczas długotrwałych obserwacji nie należy zapominać o obrocie Ziemi. Przekonująco pokazał to francuski naukowiec Jean Bernard Leon Foucault (ryc. 11).

Ryż. 11. Jean Bernard Leon Foucault (1819-1868)
Wahadło Foucaulta(rys. 12) - to masywny ciężarek zawieszony na bardzo długiej nici.

Ryż. 12. Model wahadła Foucaulta
Jeśli wahadło Foucaulta zostanie wytrącone z równowagi, to będzie opisywał kolejną trajektorię inną niż prosta (rys. 13). Przemieszczenie wahadła jest spowodowane obrotem Ziemi.

Ryż. 13. Drgania wahadła Foucaulta. Widok z góry.
Obrót Ziemi wynika z szeregu interesujące fakty. Na przykład w rzekach półkuli północnej z reguły prawy brzeg jest bardziej stromy, a lewy łagodniejszy. W rzekach półkuli południowej - wręcz przeciwnie. Wszystko to wynika właśnie z rotacji Ziemi i wynikającej z niej siły Coriolisa.
W kwestii sformułowania pierwszego prawa Newtona
Pierwsze prawo Newtona: jeśli żadne ciała nie działają na ciało lub ich działanie jest wzajemnie zrównoważone (skompensowane), to ciało to będzie w spoczynku lub poruszało się jednostajnie i prostoliniowo.
Rozważmy sytuację, która wskaże nam, że takie sformułowanie pierwszego prawa Newtona wymaga korekty. Wyobraź sobie pociąg z zasłoniętymi oknami. W takim pociągu pasażer nie może określić, czy pociąg porusza się, czy nie, po obiektach na zewnątrz. Rozważmy dwa układy odniesienia: FR związany z pasażerem Wołodia i FR związany z obserwatorem na peronie Katya. Pociąg zaczyna przyspieszać, jego prędkość rośnie. Co stanie się z jabłkiem na stole? Potoczy się w przeciwnym kierunku. Dla Katii będzie oczywiste, że jabłko porusza się bezwładnie, ale dla Wołodii będzie to niezrozumiałe. Nie widzi, że pociąg ruszył i nagle toczy się po nim jabłko leżące na stole. Jak to może być? W końcu, zgodnie z pierwszym prawem Newtona, jabłko musi pozostawać w spoczynku. Dlatego konieczne jest udoskonalenie definicji pierwszego prawa Newtona.

Ryż. 14. Przykład ilustracji
Prawidłowe sformułowanie pierwszego prawa Newtona brzmi tak: istnieją układy odniesienia, w których ciało porusza się w linii prostej i jednostajnie lub pozostaje w spoczynku, jeśli na ciało nie działają żadne siły lub wszystkie siły działające na ciało są skompensowane.
Wołodia znajduje się w nieinercjalnym układzie odniesienia, a Katia w inercyjnym.
Większość układów, rzeczywiste układy odniesienia - nieinercyjne. Rozważ prosty przykład: siedząc w pociągu, kładziesz jakieś ciało (na przykład jabłko) na stole. Gdy pociąg ruszy, zaobserwujemy taki ciekawy obraz: jabłko ruszy, potoczy się w kierunku przeciwnym do ruchu pociągu (ryc. 15). W takim przypadku nie będziemy w stanie określić, jakie ciała działają, sprawiają, że jabłko się porusza. W tym przypadku mówi się, że system jest nieinercyjny. Ale możesz wyjść z sytuacji, wchodząc siła bezwładności.

Ryż. 15. Przykład nieinercyjnego CO
Inny przykład: gdy ciało porusza się po zaokrągleniu jezdni (ryc. 16), powstaje siła, która powoduje odchylenie ciała od prostoliniowego kierunku ruchu. W tym przypadku musimy również wziąć pod uwagę nieinercyjny układ odniesienia, ale tak jak w poprzednim przypadku również możemy wyjść z sytuacji wprowadzając tzw. siły bezwładności.

Ryż. 16. Siły bezwładności podczas poruszania się po zaokrąglonej ścieżce
Wniosek
Istnieje nieskończona liczba układów odniesienia, ale większość z nich to te, których nie możemy uznać za inercyjne układy odniesienia. Inercyjny układ odniesienia jest modelem wyidealizowanym. Nawiasem mówiąc, taki układ odniesienia możemy przyjąć jako układ odniesienia związany z Ziemią lub niektórymi odległymi obiektami (na przykład z gwiazdami).
Bibliografia
- Kikoin I.K., Kikoin A.K. Fizyka: Podręcznik do klasy 9 Liceum. - M.: Oświecenie.
- Peryshkin A.V., Gutnik E.M. Fizyka. Klasa 9: podręcznik do kształcenia ogólnego. instytucje / A. V. Peryshkin, E. M. Gutnik. - 14 wyd., stereotyp. - M.: Drop, 2009. - 300.
- Sokolovich Yu.A., Bogdanova G.S. Fizyka: Podręcznik z przykładami rozwiązywania problemów. - Wydanie II, redystrybucja. - X .: Vesta: Wydawnictwo „Ranok”, 2005. - 464 s.
- Portal internetowy „physics.ru” ()
- Portal internetowy „ens.tpu.ru” ()
- Portal internetowy „prosto-o-slognom.ru” ()
Praca domowa
- Formułować definicje inercyjnych i nieinercjalnych układów odniesienia. Podaj przykłady takich systemów.
- Pierwsze prawo stanu Newtona.
- W ISO ciało jest w spoczynku. Określ, jaka jest wartość jego szybkości w ISO, która porusza się względem pierwszego układu odniesienia z szybkością v?
Na dowolne ciało mogą wpływać inne otaczające je ciała, w wyniku czego stan ruchu (spoczynku) obserwowanego ciała może się zmieniać. Jednocześnie takie oddziaływania mogą być kompensowane (zrównoważone) i nie powodować takich zmian. Kiedy mówią, że działania dwóch lub więcej ciał kompensują się nawzajem, oznacza to, że wynik ich wspólnego działania jest taki sam, jak gdyby te ciała w ogóle nie istniały. Jeżeli wpływ innych ciał na ciało jest skompensowany, to w stosunku do Ziemi ciało jest albo w spoczynku, albo porusza się w linii prostej i jednostajnie.
W ten sposób dochodzimy do jednego z podstawowych praw mechaniki, które nazywa się pierwszym prawem Newtona.
I prawo Newtona (prawo bezwładności)
Istnieją takie układy odniesienia, w których ciało poruszające się translacyjnie znajduje się w spoczynku lub jednostajnym ruchem prostoliniowym (ruch bezwładności), dopóki wpływy innych ciał nie wyprowadzą go z tego stanu.
W związku z tym, co zostało powiedziane, zmiana prędkości ciała (tj. przyspieszenie) jest zawsze spowodowana oddziaływaniem innych ciał na to ciało.
I prawo Newtona obowiązuje tylko w inercjalnych układach odniesienia.
Definicja
Układy odniesienia, względem których ciało, na które nie mają wpływu inne ciała, znajduje się w spoczynku lub porusza się jednostajnie i prostoliniowo, nazywane są inercjami.
Tylko empirycznie można stwierdzić, czy dany układ odniesienia jest inercyjny. W większości przypadków można rozważyć układy bezwładnościowe związane z Ziemią lub ciałami odniesienia poruszającymi się jednostajnie i prostoliniowo względem powierzchni Ziemi.
Rysunek 1. Inercyjne układy odniesienia
Obecnie potwierdzono eksperymentalnie, że heliocentryczny układ odniesienia związany z centrum Słońca i trzema „stałymi” gwiazdami jest praktycznie bezwładny.
Każdy inny układ odniesienia poruszający się jednostajnie i prostoliniowo względem układu inercjalnego sam w sobie jest inercyjny.
Galileusz ustalił, że nie jest możliwe ustalenie, czy układ ten jest w spoczynku, czy porusza się jednostajnie i prostoliniowo, za pomocą jakichkolwiek mechanicznych eksperymentów osadzonych w inercjalnym układzie odniesienia. To stwierdzenie nazywa się zasadą względności Galileusza lub mechaniczną zasadą względności.
Zasada ta została następnie rozwinięta przez A. Einsteina i jest jednym z postulatów szczególnej teorii względności. IFR odgrywają niezwykle ważną rolę w fizyce, ponieważ zgodnie z zasadą względności Einsteina, matematyczne wyrażenie dowolnego prawa fizyki ma tę samą postać w każdym IFR.
Jeżeli ciało odniesienia porusza się z przyspieszeniem, to skojarzony z nim układ odniesienia jest nieinercyjny i nie obowiązuje w nim pierwsze prawo Newtona.
Właściwość ciał do utrzymywania swojego stanu w czasie (prędkość ruchu, kierunek ruchu, stan spoczynku itp.) Nazywa się bezwładnością. Samo zjawisko zachowania prędkości przez poruszające się ciało przy braku wpływów zewnętrznych nazywamy bezwładnością.

Rysunek 2. Manifestacje bezwładności autobusu na początku ruchu i hamowania
Z manifestacją bezwładności ciał często spotykamy się w życiu codziennym. Przy gwałtownym przyspieszeniu autobusu pasażerowie w nim odchylają się do tyłu (ryc. 2, a), a przy ostrym hamowaniu autobusu pochylają się do przodu (ryc. 2, b), a gdy autobus skręca w prawo - do jego lewej ściany. Przy dużym przyspieszeniu samolotu startowego ciało pilota, starając się utrzymać pierwotny stan spoczynku, jest dociskane do siedzenia.
Bezwładność ciał wyraźnie przejawia się w gwałtownej zmianie przyspieszeń ciał układu, gdy inercjalny układ odniesienia zostaje zastąpiony przez nieinercjalny i odwrotnie.

Bezwładność ciała zwykle charakteryzuje jego masa (masa bezwładna).
Siła działająca na ciało z nieinercjalnego układu odniesienia nazywana jest siłą bezwładności
Jeżeli na ciało działa jednocześnie kilka sił w nieinercjalnym układzie odniesienia, z których niektóre są siłami „zwykłymi”, a inne są bezwładne, wówczas na ciało działa jedna siła wypadkowa, która jest sumą wektorów wszystkich działających na nie sił . Ta siła wypadkowa nie jest siłą bezwładności. Siła bezwładności jest tylko składową siły wynikowej.
Jeśli kij zawieszony na dwóch cienkich nitkach jest powoli ciągnięty przez sznurek przymocowany do jego środka, to:
- różdżka pęknie;
- sznur pęka;
- jedna z nitek pęknie;
- możliwa dowolna opcja, w zależności od przyłożonej siły

Rysunek 4
Siła jest przyłożona do środka kija, w miejscu, w którym zwisa linka. Ponieważ, zgodnie z pierwszym prawem Newtona, każde ciało ma bezwładność, część kija w punkcie zawieszenia linki porusza się pod działaniem przyłożonej siły, a inne części kija, na które siła nie działa , pozostanie w spoczynku. Dlatego kij pęknie w miejscu zawieszenia.
Odpowiadać. Prawidłowa odpowiedź 1.
Mężczyzna ciągnie dwa przywiązane sanie, przykładając siłę pod kątem 300 do horyzontu. Znajdź tę siłę, jeśli wiadomo, że sanie poruszają się równomiernie. Waga sań to 40 kg. Współczynnik tarcia 0,3.
$t_1$ = $t_2$ = $m$ = 40 kg
$(\mathbf \mu )$ = 0,3
$(\mathbf \alpha )$=$30^(\circ)$
$g$ = 9,8 m/s2

Rysunek 5
Ponieważ sanie poruszają się ze stałą prędkością, zgodnie z pierwszym prawem Newtona, suma sił działających na sanie wynosi zero. Napiszmy pierwsze prawo Newtona dla każdego ciała bezpośrednio w rzucie na oś i dodajmy prawo tarcia suchego Coulomba dla sań:
Oś OX Oś OY
\[\left\( \begin(array)(c) T-F_(tr1)=0 \\ F_(tr1)=\mu N_1 \\ F_(tr2)=\mu N_2 \\ F(cos \alpha - \ )F_(tr2)-T=0 \end(array) \right.\left\( \begin(array)(c) N_1-mg=0 \\ N_2+F(sin \alpha \ )-mg=0 \end(tablica) \prawo.\]
$F=\frac(2\mu mg)((cos \alfa \ )+\mu (sin \alfa \ ))=\ \frac(2\cdot 0.3\cdot 40\cdot 9.8)((cos 30() ^\circ \ )+0.3\cdot (sin 30()^\circ \ ))=231.5\ H$
Ogólny kurs fizyki
Wstęp.
Fizyka (z greckiego, od physis - natura), nauka o naturze, nauka najprostsza i jednocześnie najbardziej właściwości ogólne świat materialny(wzorce zjawisk przyrodniczych, właściwości i budowa materii oraz prawa jej ruchu). Pojęcia fizyki i jej prawa leżą u podstaw wszystkich nauk przyrodniczych. Fizyka należy do nauk ścisłych i bada ilościowe wzorce zjawisk. Dlatego oczywiście językiem fizyki jest matematyka.
Materia może istnieć w dwóch podstawowych formach: materii i pola. Są ze sobą połączone.
Przykłady: In bezruch – ciała stałe, ciecze, plazma, cząsteczki, atomy, cząstki elementarne itp.
Pole- pole elektromagnetyczne (kwanty (porcje) pola - fotony);
pole grawitacyjne (kwanty pola - grawitony).
Związek między materią a polem– anihilacja pary elektron-pozyton.
Fizyka jest z pewnością nauką światopoglądową, a znajomość jej podstaw jest… niezbędny element wszelka edukacja, kultura współczesnego człowieka.
Jednocześnie fizyka ma ogromne znaczenie praktyczne. To ona zawdzięcza zdecydowaną większość osiągnięć technicznych, informacyjnych i komunikacyjnych ludzkości.
Co więcej, ostatnie dziesięciolecia metody fizyczne badania są coraz częściej wykorzystywane w naukach, które wydają się być dalekie od fizyki, takich jak socjologia i ekonomia.
Mechanika klasyczna.
Mechanika to dziedzina fizyki, która zajmuje się najprostsza forma ruch materii - ruch ciał w przestrzeni i czasie.
Początkowo podstawowe zasady (prawa) mechaniki jako nauki sformułował I. Newton w postaci trzech praw, które otrzymały jego imię.
Wykorzystując wektorową metodę opisu, prędkość można zdefiniować jako pochodną wektora promienia punktu lub ciała 
 , a masa działa tutaj jako współczynnik proporcjonalności.
, a masa działa tutaj jako współczynnik proporcjonalności.
- Kiedy dwa ciała oddziałują, każde z nich działa na inne ciało o tej samej wartości, ale przeciwnej w kierunku siły.
Te prawa pochodzą z doświadczenia. Na nich opiera się cała mechanika klasyczna. Przez długi czas wierzono, że wszystkie obserwowane zjawiska można opisać tymi prawami. Jednak z biegiem czasu granice ludzkich możliwości rozszerzyły się, a doświadczenie pokazało, że prawa Newtona nie zawsze są aktualne, a mechanika klasyczna w rezultacie ma pewne granice stosowalności.
Ponadto nieco później zwrócimy się do mechaniki klasycznej pod nieco innym kątem – opartej na prawach zachowania, które w pewnym sensie są bardziej ogólnymi prawami fizyki niż prawa Newtona.
1.2. Granice stosowalności mechaniki klasycznej.
Pierwsze ograniczenie związane jest z prędkościami rozpatrywanych obiektów. Doświadczenie pokazuje, że prawa Newtona zachowują ważność tylko pod warunkiem:  , gdzie jest prędkość światła w próżni (
, gdzie jest prędkość światła w próżni (  ). Przy tych prędkościach skale liniowe a przedziały czasowe nie zmieniają się podczas przechodzenia z jednego układu odniesienia do drugiego. Dlatego przestrzeń i czas są absolutne w mechanice klasycznej.
). Przy tych prędkościach skale liniowe a przedziały czasowe nie zmieniają się podczas przechodzenia z jednego układu odniesienia do drugiego. Dlatego przestrzeń i czas są absolutne w mechanice klasycznej.
Tak więc mechanika klasyczna opisuje ruch z małymi prędkościami względnymi, tj. to jest fizyka nierelatywistyczna. Ograniczenie wynikające z dużych prędkości jest pierwszym ograniczeniem zastosowania klasycznej mechaniki Newtona.
Ponadto doświadczenie pokazuje, że stosowanie praw mechaniki newtonowskiej jest nielegalne do opisu mikroobiektów: molekuł, atomów, jąder, cząstki elementarne itp. Zaczynając od wymiarów
 (
( ) adekwatny opis obserwowanych zjawisk podają inni
) adekwatny opis obserwowanych zjawisk podają inni
  |
prawa - kwant. To właśnie one muszą być stosowane, gdy charakterystyczna wielkość opisująca system i mająca wymiar  , porównywalna do stałej Plancka Powiedzmy, że dla elektronu w atomie mamy . Wtedy wielkość, która ma wymiar momentu pędu, jest równa: .
, porównywalna do stałej Plancka Powiedzmy, że dla elektronu w atomie mamy . Wtedy wielkość, która ma wymiar momentu pędu, jest równa: .
Każde zjawisko fizyczne jest sekwencja wydarzeń. wydarzenie to, co dzieje się w danym punkcie przestrzeni, nazywa się ten moment czas.
Aby opisać wydarzenia, wpisz przestrzeń i czas- kategorie oznaczające główne formy istnienia materii. Przestrzeń wyraża porządek istnienia poszczególnych obiektów, a czas porządek zmian zjawisk. Przestrzeń i czas muszą być zaznaczone. Oznakowanie odbywa się poprzez wprowadzenie ciał referencyjnych i ciał referencyjnych (skalowych).
Systemy odniesienia. Inercyjne układy odniesienia.
Aby opisać ruch ciała lub zastosowany model – można zastosować punkt materialny droga wektorowa opisy, gdy pozycja interesującego nas obiektu jest ustalana za pomocą wektora promienia  odcinek skierowany od ciała odniesienia do interesującego nas punktu, którego położenie w przestrzeni może zmieniać się w czasie. Miejsce końców wektora promienia nazywa się trajektoria ruchomy punkt.
odcinek skierowany od ciała odniesienia do interesującego nas punktu, którego położenie w przestrzeni może zmieniać się w czasie. Miejsce końców wektora promienia nazywa się trajektoria ruchomy punkt.
2.1. Układy współrzędnych.
Innym sposobem opisania ruchu ciała jest: koordynować, w którym określony układ współrzędnych jest sztywno powiązany z bryłą odniesienia.
W mechanice i ogólnie w fizyce, w różnych problemach jest wygodny w użyciu różne systemy współrzędne. Najczęściej używany tzw. Kartezjański, cylindryczny i kulisty układy współrzędnych.
| |
1) Kartezjański układ współrzędnych: wprowadzane są trzy wzajemnie prostopadłe osie z określonymi skalami wzdłuż wszystkich trzech osi (linijki). Punkt odniesienia dla wszystkich osi jest pobierany z korpusu odniesienia. Granice zmiany każdej ze współrzędnych od do .
Wektor promienia określający położenie punktu jest definiowany za pomocą jego współrzędnych jako
 . (2.1)
. (2.1)
Mała objętość w układzie kartezjańskim:
 ,
,
lub w nieskończenie małych przyrostach:
 (2.2)
(2.2)
2) Cylindryczny układ współrzędnych: Odległość od osi, kąt obrotu od osi X i wysokość wzdłuż osi od bryły odniesienia są wybierane jako zmienne.
| |
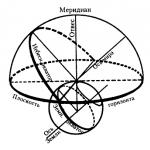
3) Sferyczny układ współrzędnych: wprowadź odległość od obiektu odniesienia do punktu zainteresowania i kąty
obrót i , liczone odpowiednio od osi i .
Wektor promieniowy - funkcja zmiennych 
 ,
,
granice zmian współrzędnych:

Współrzędne kartezjańskie są powiązane ze współrzędnymi sferycznymi następującymi zależnościami:
 (2.6)
(2.6)
Element objętości we współrzędnych sferycznych:
 (2.7)
(2.7)
2.2. System odniesienia.
Aby skonstruować układ odniesienia, układ współrzędnych sztywno połączony z ciałem odniesienia musi być uzupełniony zegarem. Zegar może być w różne punkty spacje, więc muszą być zsynchronizowane. Synchronizacja zegara odbywa się za pomocą sygnałów. Niech czas propagacji sygnału od miejsca wystąpienia zdarzenia do punktu obserwacji będzie równy . Wtedy nasz zegar powinien pokazywać czas w momencie pojawienia się sygnału. ![]() jeżeli zegar w miejscu zdarzenia w momencie jego wystąpienia pokazuje czas . Takie zegary będziemy uważać za zsynchronizowane.
jeżeli zegar w miejscu zdarzenia w momencie jego wystąpienia pokazuje czas . Takie zegary będziemy uważać za zsynchronizowane.
Jeżeli odległość od punktu w przestrzeni, w którym nastąpiło zdarzenie, do punktu obserwacji wynosi , a szybkość transmisji sygnału wynosi , to  . W mechanice klasycznej przyjmuje się, że prędkość propagacji sygnału
. W mechanice klasycznej przyjmuje się, że prędkość propagacji sygnału ![]() . Dlatego w całej przestrzeni wprowadzono jeden zegar.
. Dlatego w całej przestrzeni wprowadzono jeden zegar.
Agregat ciała odniesienia, układy współrzędnych i zegary Formularz System odniesienia(WSPÓŁ).
Istnieje nieskończona liczba systemów odniesienia. Doświadczenie pokazuje, że chociaż prędkości są małe w porównaniu z prędkością światła  , skale liniowe i przedziały czasowe nie zmieniają się podczas przechodzenia z jednego systemu odniesienia do drugiego.
, skale liniowe i przedziały czasowe nie zmieniają się podczas przechodzenia z jednego systemu odniesienia do drugiego.
Innymi słowy, w mechanice klasycznej przestrzeń i czas są absolutne.
Jeśli  , wtedy skale i przedziały czasowe zależą od wyboru SS, tj. przestrzeń i czas stają się pojęciami względnymi. To już jest obszar mechanika relatywistyczna.
, wtedy skale i przedziały czasowe zależą od wyboru SS, tj. przestrzeń i czas stają się pojęciami względnymi. To już jest obszar mechanika relatywistyczna.
2.3.Inercyjne układy odniesienia(ISO).
Stoimy więc przed wyborem układu odniesienia, w którym moglibyśmy rozwiązać problemy mechaniki (opisać ruch ciał i ustalić przyczyny, które go powodują). Okazuje się, że nie wszystkie układy odniesienia są sobie równe, nie tylko w formalnym opisie problemu, ale, co ważniejsze, reprezentują przyczyny, które powodują zmianę stanu organizmu na różne sposoby.
Układ odniesienia, w którym najprościej sformułowane są prawa mechaniki, pozwala ustalić pierwsze prawo Newtona, które postuluje istnienie inercyjne układy odniesienia- ISO.
I prawo mechaniki klasycznej - prawo bezwładności Galileusza-Newtona.
Istnieje taki układ odniesienia, w którym punkt materialny, jeśli wykluczymy jego oddziaływanie ze wszystkimi innymi ciałami, będzie poruszał się na zasadzie bezwładności, tj. utrzymać stan spoczynku lub umundurowania ruch prostoliniowy.
To jest inercyjny układ odniesienia (ISO).
W ISO zmiana ruchu punktu materialnego (przyspieszenie) wynika jedynie z jego interakcji z innymi ciałami, ale nie zależy od właściwości samego układu odniesienia.