Ruch prostoliniowy i krzywoliniowy. Ruch prostoliniowy i ruch po obwodzie punktu materialnego
Jeśli przyspieszenie punkt materialny jest przez cały czas równy zeru, to prędkość jego ruchu jest stała pod względem wielkości i kierunku. Trajektoria w tym przypadku jest linią prostą. Ruch punktu materialnego w sformułowanych warunkach nazywamy jednostajnym prostoliniowym. Przy ruchu prostoliniowym nie ma składowej dośrodkowej przyspieszenia, a ponieważ ruch jest jednostajny, składowa styczna przyspieszenia wynosi zero.
Jeśli przyspieszenie pozostaje stałe w czasie (), ruch nazywa się równie zmiennym lub nierównym. Równie zmienny ruch może być równomiernie przyspieszony, jeśli a > 0 i równie wolny, jeśli a< 0. В этом случае мгновенное ускорение оказывается равным среднему ускорению за любой промежуток времени. Тогда из формулы (1.5) следует а = Dv/Dt = (v-v o)/t, откуда
![]() (1.7)
(1.7)
gdzie v o - prędkość początkowa w t=0, v - prędkość w czasie t.
Zgodnie ze wzorem (1.4) ds = vdt. Następnie 
Ponieważ ruch jednostajny a=const, to
![]() (1.8)
(1.8)
Wzory (1.7) i (1.8) obowiązują nie tylko dla jednostajnie zmiennego (niejednostajnego) ruchu prostoliniowego, ale także dla swobodny spadek ciała i ruchu ciała wyrzuconego do góry. W ostatnich dwóch przypadkach a \u003d g \u003d 9,81 m / s 2.
Dla jednostajnego ruchu prostoliniowego v = v o = const, a = 0, a wzór (1.8) przyjmuje postać s = vt.
Ruch kołowy jest najprostszym przypadkiem ruchu krzywoliniowego. Prędkość v ruchu punktu materialnego po okręgu nazywana jest liniową. Przy stałej prędkości liniowej modulo ruch po okręgu jest jednostajny. Nie ma przyspieszenia stycznego punktu materialnego podczas ruchu jednostajnego po okręgu, a t \u003d 0. Oznacza to, że nie ma zmiany modulo prędkości. Zmiana wektora prędkości liniowej w kierunku charakteryzuje się przyspieszeniem normalnym i n ¹ 0. W każdym punkcie trajektorii kołowej wektor a n jest skierowany wzdłuż promienia do środka okręgu.
i n \u003d v 2 / R, m / s 2. (1.9)
Wynikowe przyspieszenie jest rzeczywiście dośrodkowe (normalne), ponieważ przy Dt->0 Dj również dąży do zera (Dj->0), a wektory i będą skierowane wzdłuż promienia okręgu do jego środka.
Wraz z prędkością liniową v ruch jednostajny punkt materialny na okręgu charakteryzuje się prędkością kątową. Prędkość kątowa to stosunek kąta obrotu Dj wektora promienia do przedziału czasu, w którym nastąpił ten obrót,
Rad/s (1.10)
W przypadku ruchu nierównomiernego stosuje się pojęcie chwilowej prędkości kątowej
![]() .
.
Przedział czasu t, podczas którego punkt materialny wykonuje jeden pełny obrót wokół obwodu, nazywany jest okresem obrotu, a odwrotność okresu to częstotliwość obrotu: n \u003d 1 / T, s -1.
Przez jeden okres kąt obrotu wektora promienia punktu materialnego wynosi 2π rad, dlatego Dt \u003d T, skąd okres obrotu i prędkość kątowa są funkcją okresu lub częstotliwości obrotu
Wiadomo, że przy ruchu jednostajnym punktu materialnego po okręgu, droga przez niego przebyta zależy od czasu ruchu i prędkości liniowej: s = vt, m. Droga, jaką punkt materialny pokonuje po okręgu o promieniu R , przez okres, jest równy 2πR. Wymagany do tego czas jest równy okresowi rotacji, to znaczy t \u003d T. A zatem
2πR = vT, m (1.11)
i v = 2nR/T = 2nR, m/s. Ponieważ kąt obrotu wektora promienia punktu materialnego w okresie obrotu T jest równy 2π, to na podstawie (1.10) przy Dt = T, . Podstawiając do (1.11), otrzymujemy i stąd znajdujemy zależność między prędkością liniową i kątową
Prędkość kątowa jest wielkością wektorową. Wektor prędkości kątowej jest skierowany od środka okręgu, wzdłuż którego punkt materialny porusza się z prędkością liniową v, prostopadłą do płaszczyzny okręgu zgodnie z regułą prawej śruby.
Na nierówny ruch punktu materialnego na okręgu zmienia się prędkość liniowa i kątowa. Przez analogię z przyspieszenie liniowe w tym przypadku wprowadza się pojęcie średniego przyspieszenia kątowego i chwilowego: ![]() . Zależność między przyspieszeniami stycznymi i kątowymi ma postać .
. Zależność między przyspieszeniami stycznymi i kątowymi ma postać .
Za pomocą tej lekcji będziesz mógł samodzielnie przestudiować temat „Ruch prostoliniowy i krzywoliniowy. Ruch ciała po okręgu ze stałą prędkością modulo. Najpierw scharakteryzujemy ruch prostoliniowy i krzywoliniowy, rozważając, jak wektor prędkości i siła przyłożona do ciała są powiązane w tego typu ruchu. Następnie rozważ szczególny przypadek kiedy ciało porusza się po okręgu ze stałą prędkością modulo.
W poprzedniej lekcji przyjrzeliśmy się kwestiom związanym z prawem powaga. Temat dzisiejszej lekcji jest ściśle związany z tym prawem, zwrócimy się do ruchu jednostajnego ciała po okręgu.
Wcześniej powiedzieliśmy, że ruch - jest to zmiana położenia ciała w przestrzeni w stosunku do innych ciał w czasie. Ruch i kierunek ruchu charakteryzuje m.in. szybkość. Zmiana prędkości i sam rodzaj ruchu są związane z działaniem siły. Jeśli na ciało działa siła, to ciało zmienia swoją prędkość.
Jeżeli siła jest skierowana równolegle do ruchu ciała, to taki ruch będzie prosty(rys. 1).
Ryż. jeden. Ruch prostoliniowy
krzywolinijny nastąpi taki ruch, gdy prędkość ciała i siła przyłożona do tego ciała będą skierowane względem siebie pod pewnym kątem (ryc. 2). W takim przypadku prędkość zmieni swój kierunek.

Ryż. 2. Ruch krzywoliniowy
Więc w ruch prostoliniowy wektor prędkości jest skierowany w tym samym kierunku, co siła przyłożona do ciała. ALE ruch krzywoliniowy jest takim ruchem, gdy wektor prędkości i siła przyłożona do ciała są ustawione pod pewnym kątem względem siebie.
Rozważmy szczególny przypadek ruchu krzywoliniowego, kiedy ciało porusza się po okręgu ze stałą prędkością w wartości bezwzględnej. Kiedy ciało porusza się po okręgu ze stałą prędkością, zmienia się tylko kierunek prędkości. Modulo pozostaje stała, ale zmienia się kierunek prędkości. Taka zmiana prędkości prowadzi do obecności przyspieszenia w ciele, które nazywa się dośrodkowy.

Ryż. 6. Ruch po zakrzywionej ścieżce
Jeśli trajektoria ciała jest krzywą, można ją przedstawić jako zbiór ruchów po łukach kół, jak pokazano na ryc. 6.

Na ryc. 7 pokazuje, jak zmienia się kierunek wektora prędkości. Prędkość podczas takiego ruchu kierowana jest stycznie do okręgu, po łuku, po którym porusza się ciało. W ten sposób jego kierunek stale się zmienia. Nawet jeśli prędkość modulo pozostaje stała, zmiana prędkości prowadzi do przyspieszenia:
![]()
W tym przypadku przyśpieszenie będzie skierowany w stronę środka koła. Dlatego nazywa się to dośrodkowym.
Dlaczego przyspieszenie dośrodkowe jest skierowane w stronę centrum?
Przypomnijmy, że jeśli ciało porusza się po zakrzywionej ścieżce, jego prędkość jest styczna. Prędkość jest wielkością wektorową. Wektor ma wartość liczbową i kierunek. Prędkość, z jaką ciało się porusza, nieustannie zmienia swój kierunek. Oznacza to, że różnica prędkości w różnych momentach nie będzie równa zeru (), w przeciwieństwie do prostoliniowego ruchu jednostajnego.
Tak więc mamy zmianę prędkości w pewnym okresie czasu. Relacją z jest przyspieszenie. Dochodzimy do wniosku, że nawet jeśli prędkość nie zmienia się w wartości bezwzględnej, ciało wykonujące ruch jednostajny po okręgu ma przyspieszenie.
Gdzie jest skierowane to przyspieszenie? Rozważ ryc. 3. Niektóre ciała poruszają się krzywoliniowo (po łuku). Prędkość ciała w punktach 1 i 2 jest styczna. Ciało porusza się jednostajnie, to znaczy moduły prędkości są równe: , ale kierunki prędkości nie pokrywają się.

Ryż. 3. Ruch ciała po okręgu
Odejmij prędkość od i pobierz wektor . Aby to zrobić, musisz połączyć początki obu wektorów. Równolegle przenosimy wektor na początek wektora . Budujemy do trójkąta. Trzeci bok trójkąta będzie wektorem różnicy prędkości (rys. 4).

Ryż. 4. Wektor różnicy prędkości
Wektor skierowany jest w stronę okręgu.
Rozważ trójkąt utworzony przez wektory prędkości i wektor różnicy (rys. 5).

Ryż. 5. Trójkąt utworzony przez wektory prędkości
Ten trójkąt jest równoramienny (moduły prędkości są równe). Więc kąty u podstawy są równe. Napiszmy równanie na sumę kątów trójkąta:
![]()
Dowiedz się, gdzie przyspieszenie jest skierowane w danym punkcie trajektorii. Aby to zrobić, zaczynamy zbliżać punkt 2 do punktu 1. Przy tak nieograniczonej staranności kąt będzie dążył do 0, a kąt do. Kąt między wektorem zmiany prędkości a samym wektorem prędkości wynosi . Prędkość jest skierowana stycznie, a wektor zmiany prędkości skierowany jest w stronę środka okręgu. Oznacza to, że przyspieszenie skierowane jest również w stronę środka okręgu. Dlatego to przyspieszenie nazywa się dośrodkowy.
Jak znaleźć przyspieszenie dośrodkowe?
Rozważ trajektorię, po której porusza się ciało. W tym przypadku jest to łuk koła (ryc. 8).

Ryż. 8. Ruch ciała po okręgu
Rysunek przedstawia dwa trójkąty: trójkąt utworzony przez prędkości oraz trójkąt utworzony przez promienie i wektor przemieszczenia. Jeśli punkty 1 i 2 są bardzo blisko siebie, wektor przemieszczenia będzie taki sam jak wektor ścieżki. Oba trójkąty są równoramiennymi o tych samych kątach wierzchołkowych. Więc trójkąty są podobne. Oznacza to, że odpowiednie boki trójkątów są w tym samym stosunku:
Przemieszczenie jest równe iloczynowi prędkości i czasu: . Zastępowanie ta formuła, możesz otrzymać następujące wyrażenie na przyspieszenie dośrodkowe:
Prędkość kątowa oznaczone grecki list omega (ω), mówi o kącie, o jaki ciało obraca się w jednostce czasu (ryc. 9). Jest to wielkość łuku, w stopniach, pokonywana przez ciało w pewnym czasie.

Ryż. 9. Prędkość kątowa
Zwróćmy uwagę, że jeśli solidny obraca się, to prędkość kątowa dowolnych punktów na tym ciele będzie wartością stałą. Punkt jest bliżej środka obrotu lub dalej - to nie ma znaczenia, to znaczy nie zależy od promienia.
Jednostką miary w tym przypadku będą stopnie na sekundę () lub radiany na sekundę (). Często słowo „radian” nie jest napisane, ale po prostu napisane. Na przykład znajdźmy, jaka jest prędkość kątowa Ziemi. Ziemia wykonuje pełny obrót w ciągu godziny iw tym przypadku możemy powiedzieć, że prędkość kątowa jest równa:
![]()
Zwróć także uwagę na zależność między prędkościami kątowymi i liniowymi:
Prędkość liniowa jest wprost proporcjonalna do promienia. Im większy promień, tym większa prędkość liniowa. W ten sposób oddalając się od środka obrotu, zwiększamy naszą prędkość liniową.
Należy zauważyć, że ruch po okręgu ze stałą prędkością jest szczególnym przypadkiem ruchu. Jednak ruch okrężny może być również nierówny. Prędkość może zmieniać się nie tylko w kierunku i pozostawać taka sama w wartości bezwzględnej, ale także zmieniać swoją wartość, tj. oprócz zmiany kierunku następuje również zmiana modułu prędkości. W tym przypadku mówimy o tzw. przyspieszonym ruchu kołowym.
Co to jest radian?
Istnieją dwie jednostki pomiaru kątów: stopnie i radiany. W fizyce z reguły najważniejsza jest miara kąta w radianach.
Skonstruujmy kąt środkowy , który opiera się na łuku długości .
Ruch to zmiana pozycji
ciała w przestrzeni w stosunku do innych
ciała w czasie. Ruch i
kierunek ruchu jest scharakteryzowany w
w tym prędkość. Reszta
prędkość i sam rodzaj ruchu są związane z
działanie siły. Jeśli ciało jest dotknięte
siła, ciało zmienia swoją prędkość.
ruch ciała w jednym kierunku, potem to
ruch będzie prosty. Taki ruch będzie krzywoliniowy,
gdy prędkość ciała i siła przyłożona do
to ciała są skierowane względem siebie
przyjaciel pod pewnym kątem. W tym przypadku
prędkość się zmieni
kierunek. Tak więc dla prostoliniowego
ruch, wektor prędkości jest do niego skierowany
po tej samej stronie, co siła przyłożona do
ciało. I krzywoliniowy
ruch jest ruchem
kiedy wektor prędkości i siła,
przymocowany do ciała, znajdujący się pod
pod pewnym kątem do siebie.
przyspieszenie dośrodkowe
ŚRODKOWYPRZYŚPIESZENIE
Rozważ szczególny przypadek
ruch krzywoliniowy, gdy ciało
porusza się po okręgu ze stałą
moduł prędkości. Kiedy ciało się porusza
po okręgu ze stałą prędkością, a następnie
zmienia się tylko kierunek prędkości. Przez
modulo, pozostaje stała i
kierunek zmiany prędkości. Taki
zmiana prędkości prowadzi do
ciało przyspieszenia, które
zwany dośrodkowym. Jeśli trajektoria ciała jest
krzywa, może być reprezentowana jako
zestaw ruchów po łukach
koła, jak pokazano na ryc.
3.Na ryc. 4 pokazuje, jak zmienia się kierunek
wektor prędkości. Szybkość tego ruchu
skierowane stycznie do okręgu, wzdłuż łuku
którym ciało się porusza. Tak więc jej
kierunek ciągle się zmienia. Nawet
prędkość modulo pozostaje stała,
zmiana prędkości prowadzi do pojawienia się przyspieszenia: W takim przypadku przyspieszenie będzie
skierowany w stronę środka koła. Dlatego
nazywa się to dośrodkowym.
Można go obliczyć za pomocą następujących
formuła:
Prędkość kątowa. zależność między prędkością kątową i liniową
PRĘDKOŚĆ KĄTOWA. POŁĄCZENIENAROŻNIK I LINIA
SZYBKOŚCI
Niektóre cechy ruchu
kręgi
Prędkość kątowa oznaczana jest greckim
z literą omega (w) wskazuje, który
kąt obraca ciało na jednostkę czasu.
To jest wielkość łuku w stopniach,
przeszedł przez ciało po pewnym czasie.
Zauważ, że jeśli sztywny korpus się obraca, to
prędkość kątowa dla dowolnych punktów na tym ciele
będzie wartością stałą. bliższy punkt
znajduje się w kierunku środka obrotu lub dalej -
to nie ma znaczenia, czyli nie zależy od promienia. Jednostką miary w tym przypadku byłaby
stopnie na sekundę lub radiany
daj mi sekundę. Często słowo „radian” nie jest napisane, ale
po prostu napisz c-1. Na przykład znajdźmy
jaka jest prędkość kątowa ziemi. Ziemia
wykonuje pełny obrót o 360° w ciągu 24 godzin i
W tym przypadku można powiedzieć, że
prędkość kątowa jest równa. Zwróć także uwagę na związek kątowy
prędkość i prędkość linii:
V = w. R.
Należy zauważyć, że ruch
koła ze stałą prędkością to iloraz
sprawa ruchu. Jednak ruch okrężny
może być również nierówna. prędkość może
zmienić nie tylko kierunek i pozostać
identyczny moduł, ale także zmienia się na swój sposób
znaczenie, tj. oprócz zmiany kierunku,
następuje również zmiana modułu prędkości. W
W tym przypadku mówimy o tzw
przyspieszony ruch okrężny.
W zależności od kształtu trajektorii ruch można podzielić na prostoliniowy i krzywoliniowy. Najczęściej napotkasz ruchy krzywoliniowe, gdy ścieżka jest reprezentowana jako krzywa. Przykładem tego typu ruchu jest droga ciała rzuconego pod kątem do horyzontu, ruch Ziemi wokół Słońca, planet i tak dalej.
Obrazek 1 . Trajektoria i przemieszczenie w ruchu krzywoliniowym
Definicja 1Ruch krzywoliniowy nazywany ruchem, którego trajektoria jest zakrzywioną linią. Jeżeli ciało porusza się po torze zakrzywionym, to wektor przemieszczenia s → jest skierowany wzdłuż cięciwy, jak pokazano na rysunku 1, a l jest długością toru. Kierunek prędkości chwilowej ciała jest styczny w tym samym punkcie trajektorii, gdzie in ten moment znajduje się poruszający się obiekt, jak pokazano na rysunku 2.

Rysunek 2. Prędkość chwilowa w ruchu krzywoliniowym
Definicja 2
Ruch krzywoliniowy punktu materialnego nazywany jednostajnym, gdy moduł prędkości jest stały (ruch po okręgu) i jednostajnie przyspieszany ze zmiennym kierunkiem i modułem prędkości (ruch rzucanego ciała).
Ruch krzywoliniowy jest zawsze przyspieszony. Wyjaśnia to fakt, że nawet przy niezmienionym module prędkości, ale przy zmienionym kierunku, zawsze występuje przyspieszenie.
W celu zbadania ruchu krzywoliniowego punktu materialnego stosuje się dwie metody.
Ścieżka podzielona jest na oddzielne sekcje, z których każdy można uznać za prosty, jak pokazano na rysunku 3.
Rysunek 3. Dzielenie ruchu krzywoliniowego na translacyjny
Teraz dla każdej sekcji możesz zastosować prawo ruchu prostoliniowego. Ta zasada jest akceptowana.
Za najdogodniejszą metodę rozwiązania uważa się przedstawienie ścieżki jako zestawu kilku ruchów po łukach okręgów, jak pokazano na rysunku 4. Liczba partycji będzie znacznie mniejsza niż w poprzedniej metodzie, ponadto ruch po okręgu jest już krzywoliniowy.

Rysunek 4. Podział ruchu krzywoliniowego na ruchy po łukach okręgów
Uwaga 1
Aby zarejestrować ruch krzywoliniowy, należy umieć opisać ruch po okręgu, przedstawić dowolny ruch w postaci zestawów ruchów po łukach tych okręgów.
Badanie ruchu krzywoliniowego obejmuje kompilację równania kinematycznego opisującego ten ruch i pozwalającego na wyznaczenie wszystkich charakterystyk ruchu na podstawie dostępnych warunków początkowych.
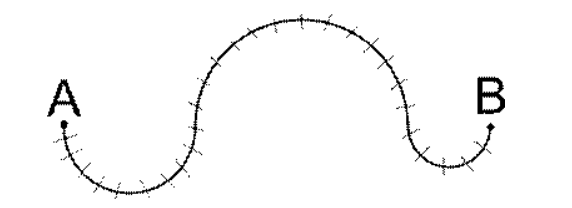
Przykład 1
Biorąc pod uwagę punkt materialny poruszający się po krzywej, jak pokazano na rysunku 4. Środki okręgów O 1 , O 2 , O 3 leżą na tej samej linii prostej. Musisz znaleźć ruch
s → i długość ścieżki l podczas ruchu z punktu A do B.
Rozwiązanie
Z warunku mamy, że środki okręgu należą do jednej prostej, stąd:
s → = R 1 + 2 R 2 + R 3 .
Ponieważ trajektoria ruchu jest sumą półokręgów, to:
l ~ A B \u003d π R 1 + R 2 + R 3.
Odpowiedź: s → \u003d R 1 + 2 R 2 + R 3, l ~ A B \u003d π R 1 + R 2 + R 3.
Przykład 2
Podana jest zależność drogi przebytej przez ciało od czasu, reprezentowana przez równanie s (t) \u003d A + B t + C t 2 + D t 3 (C \u003d 0, 1 m / s 2, D \ u003d 0, 003 m/s 3) . Oblicz, po jakim czasie po rozpoczęciu ruchu przyspieszenie ciała będzie równe 2 m / s 2
Rozwiązanie

Odpowiedź: t = 60 s.
Jeśli zauważysz błąd w tekście, zaznacz go i naciśnij Ctrl+Enter
Polecamy również
 Zasilacz impulsowy: naprawa i udoskonalenie
Zasilacz impulsowy: naprawa i udoskonalenie
 Zdalne sterowanie światłem
Zdalne sterowanie światłem
 Lekcje pływania dla dzieci w wieku przedszkolnym
Lekcje pływania dla dzieci w wieku przedszkolnym
 Uwagi dla mistrza - domowe alarmy domowe
Uwagi dla mistrza - domowe alarmy domowe
 Śmigło zegarowe w Atmega8
Śmigło zegarowe w Atmega8
 Przykłady zastosowania urządzenia i przekaźnika, jak prawidłowo dobrać i podłączyć przekaźnik Mikrokontroler i proste obwody przełączające przekaźnika
Przykłady zastosowania urządzenia i przekaźnika, jak prawidłowo dobrać i podłączyć przekaźnik Mikrokontroler i proste obwody przełączające przekaźnika