Hogyan készítsünk gemkapocs robotot? Egy tucat házi robot Csináld magad sétáló robot kis állatrajzok.
A gemkapcsokból és motorból készült sétálók nem csak házi készítésű játékok, hanem egy egész arzenál technológiai módszerekés a mérnöki gondolkodás.
Egy ilyen robotot saját kezűleg készíteni nem csak érdekes, de fejleszti az ujjak finom motoros képességeit, és egy gyerek számára ez egy teljes kinyilatkoztatás - elvégre egy igazi sétálórobot valójában a semmiből jön létre!
Egy egyszerű működő robot összeállításához közönséges gemkapcsokból saját kezűleg néhány egyszerű és könnyen hozzáférhető anyagra lesz szüksége. Először is, ezek maguk a fémmerevítők, valamint egy kis szerszámkészlet. A szerszámok közül szükség lesz forrasztópáka, forrasztó, fogó, huzalvágó, körfogó, valamint egy kis Elektromos motor sebességváltóval és akkumulátorral.
Kezdetben tartókeretet kell készítenie egy hosszú és vastag gémkapocsból, azaz téglalapba kell hajlítani, és a végeit biztonságosan forrasztani kell. A robot alkatrészeit és elemeit erre a keretre szerelik fel az összeszerelési folyamat során.
Ezután hurkokat kell készítenie, amelyekre a robot lábait rögzítik. Ezeket forrasztópáka segítségével a téglalap alakú kerethez kell forrasztani. A gemkapcsokból ezután kis lábakat készítenek egy sétálórobot számára. Ebben az esetben először kívánatos összeszerelni az összetett első mancsokat, majd az összes többit.

A robot végtagjainak összeszerelése után el kell kezdenie a főtengely gyártását. A merevítőnek erősnek és teljesen egyenletesnek kell lennie.

A főtengelyt óvatosan kell elkészíteni fogóval és kerek fogóval. Amikor a tengely elkészült, óvatosan rá kell helyezni a motor fogaskerekére. Ezt követően speciális hajtórudakat készítenek, amelyek összekötik a robot lábait a főtengellyel. Ezután a fogaskereket a főtengelyhez forrasztják.


Ezután egy akkumulátort és egy kapcsolót helyeznek a robotvázra. Ha minden helyesen történik, a robot elindul.
Itt van egy oktatóvideó arról, hogyan készítsünk házi készítésű sétálórobotot gemkapcsokból saját kezűleg, nézze meg, ha valami nem világos a cikkből.
01.06.2010, 12:15
Nagyon gyakran mindenféle robotikával foglalkozó fórumon vagy webhelyen megtalálható a következő kérdés: hogyan készítsünk robotot rögtönzött anyagokból?
Az ilyen kérdéseknél azonnal kiderül, hogy aki felteszi őket, az kezdő, és keveset tud a robotikáról. De furcsa módon LEHETSÉGES improvizált anyagokból robotot készíteni... csak okosnak kell lenni.
Bevezetés
Nem szándékoztam valamiféle grandiózus könyvet vagy átfogó képzést írni. Csak néhány újonc kérdésére akartam válaszolni. Valójában nem vesztegetem az időt, és azonnal leírom, hogyan készíthetsz egy egyszerű robotot, amely reagálna környezet, vagy inkább bejárt akadályokat.
Kiképzés
- Azt hiszem, megérti, hogy bizonyos alkatrészek szükségesek egy robot létrehozásához. Ugyanis:
1. 1. két motor, egyenként 1,5 V
2. 2. két SPDT kapcsoló
3. 3. két elem
4. 4. egy tok ezekhez az akkumulátorokhoz
5. 5. egy műanyag golyó átmenő lyukkal
6. 6. három gemkapocs
7. 7. néhány vezeték
1. lépés
Vannak vezetékeink. 13 darab, egyenként 6 cm-es vezetéket vágunk. 
Most minden vezetéknél fogóval vagy késsel távolítunk el 1 cm-es szigetelést mindkét végéről. 
2. lépés
Forrasztópáka segítségével két vezetéket rögzítünk a motorokhoz és három vezetéket az SPDT kapcsolókhoz. 
3. lépés
Szerezz egy elemtartót. Egyrészt piros és fekete vezetékek indulnak el tőle. Ezért forrasz egy másik vezetéket a másik oldalra. 
Most fordítsa fejjel lefelé az elemtartót, és ragasztóval ragassza fel az SPDT kapcsolókat V betű alakjában. 
4. lépés Ezután a két motorunkat az akkumulátorházra ragasztjuk úgy, hogy előre forogjanak. 
5. lépés
Vegyünk egy nagy gemkapcsot. Bontsuk ki. Kapunk egy vezetéket. Vegyünk egy műanyag vagy fém golyót, és húzzuk át az "egykori gemkapcsot" az átmenő lyukon. Most ragassza ezt a mintát az elemtartóhoz. 
6. lépés
A legnehezebb folyamat elkezdődött. Megfelelően kell forrasztania és forrasztania az összes vezetéket. Ennek módja az ábrán látható. 
7. lépés
Annak érdekében, hogy a robotunk reagálni tudjon a körülötte lévő világra, és képes legyen megkerülni az akadályokat, antennákat készítünk hozzá. Fogunk két gemkapcsot, hajlítsuk ki. 
Ezután ragassza őket az SPDT kapcsolókhoz (jobb ragasztani, mint forrasztani - különben átforraszthatja a kapcsolókat). 
8. lépés
A motorok tengelyeinek törés elleni védelme érdekében gumiba öltöztetjük. Ehhez vegye le a szigetelést a vezetékről, és helyezze a tengelyre. 
9. lépés
Jól? Tehát te és én elkészítettük az első egyszerű robotot, amely reagál az akadályokra és megkerüli azokat. A robot működéséhez helyezze be az elemeket, és fordítva. A robot mozgásának gyorsításához vagy lassításához pedig ragasszuk fel a motorokat, ahogy az ábrán is látható. 
Következtetés
Ebben a cikkben a legelemibb robot létrehozását vizsgáltuk.
De nem akarsz és nem is fogsz itt megállni, igaz?
Általában különböző kutatóközpontok vagy cégek által létrehozott robotokról beszélünk. Azonban a robotok változó mértékben sikert szerte a világon gyűjteni hétköznapi emberek. Tehát ma tíz házi készítésű robotot mutatunk be.
Ádám
Egy német idegtudományi hallgató összeállított egy Adam nevű androidot. A neve az Advanced Dual Arm Manipulator vagy a "fejlett kétkezes manipulátor" rövidítése. A robot karjainak öt szabadságfoka van. Ezeket a német Igus cég Robolink csuklói hajtják. Külső kábelek segítségével forgatják Adam ízületeit. Emellett Adam fejére két videokamera, hangszóró, beszédszintetizátor, valamint a robot ajkának mozgását szimuláló LCD-panel is felszerelve.
MPR-1
Az MPR-1 robot arról nevezetes, hogy nem vasból vagy műanyagból készült, mint a legtöbb társa, hanem papírból. A robot megalkotója, Kikousya művész szerint az MPR-1 anyaga papír, néhány tiplik és pár gumiszalag. A robot ugyanakkor magabiztosan mozog, bár mechanikai elemei is papírból készülnek. A forgattyús mechanizmus biztosítja a robot lábainak mozgását, lábait úgy alakították ki, hogy felületük mindig párhuzamos legyen a padlóval.
Robot Paparazzi Boxie
A Boxie robotot Alexander Reben amerikai mérnök alkotta meg, a Massachusetts Institute of Technology munkatársától. Boxie-nak, aki kissé hasonlít a jól ismert Wall-E rajzfilm hősére, segítenie kell a személyzet finanszírozását. tömegmédia. A kicsi és fürge paparazzi teljesen kartonból készült, hernyók segítségével mozog, és ultrahang segítségével navigál az utcán, ami segít leküzdeni a különféle akadályokat. A robot viccesen gyerekes hangon veszi fel az interjút, a válaszadó pedig bármikor megszakíthatja a beszélgetést egy speciális gomb megnyomásával. A Boxie akár hat órányi videót is rögzíthet, és elküldheti a tulajdonosának a legközelebbi Wi-Fi hotspot segítségével.
Morphex
Kare Halvorsen norvég mérnök megalkotott egy hatlábú Morphex robotot, amely labdává és vissza tud fordulni. Ezenkívül a robot képes mozogni. A robot mozgása annak köszönhető, hogy a motorok tolják előre. A robot ívben mozog, nem egyenes vonalban. Kialakításának köszönhetően a Morphex nem tudja önállóan korrigálni mozgásának pályáját. NÁL NÉL Ebben a pillanatban Halvorsen dolgozik a probléma megoldásán. Érdekes frissítés érkezik: a robot megalkotója 36 LED-et szeretne hozzáadni, amelyek lehetővé tennék a Morphex számára a színváltást.
kamionos
Az amerikaiak Tim Heath és Ryan Hickman úgy döntöttek, hogy egy kis robotot hoznak létre androidos telefon. Az általuk megalkotott Truckbot robot a dizájnt tekintve meglehetősen egyszerű: a HTC G1 telefon a robot tetején található, lévén az „agya”. Jelenleg a robot képes sík felületen mozogni, megválasztani a mozgás irányát és mindenféle mondattal kísérni az akadályokkal való ütközést.
Robot részvényes
Egyszer egy amerikai, Brian Dory, aki bővítőkártyákat fejleszt, a következő problémával szembesült: nagyon nehéz egy kétsoros tűs fésűt saját kezűleg forrasztani. Briannek szüksége volt egy asszisztensre, ezért úgy döntött, hogy létrehoz egy robotot, amely képes forrasztani. Briannek két hónapba telt a robot kifejlesztése. Az elkészített robot két forrasztópákával van felszerelve, amelyek egyidejűleg két sor érintkezőt is képesek forrasztani. A robotot PC-n és táblagépen keresztül irányíthatja.
Mechatronikus tank
Minden családnak megvan a kedvenc hobbija. Például Robert Beatty amerikai mérnök családjában robotokat konstruálnak. Robertet tizenéves lányai segítik, felesége és újszülött lánya pedig erkölcsi támogatást nyújt nekik. Legimpozánsabb alkotásuk az önjáró Mechatronikus Tank. 20 kg páncéljával ez a biztonsági robot minden bűnöző számára veszélyt jelent. A robot tornyára szerelt nyolc szonár lehetővé teszi a látómezőben lévő tárgyak távolságának egy hüvelyk pontossággal történő kiszámítását. A robot percenként ezer lövés sebességgel lő fémgolyókat is.
robot kutya
Egy Max nevű amerikai elkészítette a híres mini másolatát. Max ötmilliméteres akrilüveg törmelékből készítette el a robot tartószerkezetét, és az összes alkatrészt közönséges menetes csavarokkal rögzítették. Ezenkívül a robot létrehozásakor miniatűr szervókat használtak, amelyek felelősek a végtagjainak mozgásáért, valamint az Arduino Mega készletből származó alkatrészeket, amelyek koordinálják a mechanikus kutya motoros folyamatát.
robot labda
A mézeskalács robotot Jerome Demers tervezte, tovább működik napelemek. A robot belsejében egy kondenzátor található, amely a napenergiával működő alkatrészekhez kapcsolódik. Az energia felhalmozásához rossz időben van szükség. Ha van elegendő napenergia, a labda elkezd előre gurulni.
Roboarm
Kezdetben tanár technológiai Intézet Georgia, Gil Weinberg robotkart tervezett egy dobos számára, akinek amputálták a karját. Jill ezután megalkotott egy automata időzítési technológiát, amely lehetővé teszi, hogy egy kétkarú dobos robotkarját használja. extra kéz. A Robohand reagál a dobos játékmódjára, létrehozva a saját ritmusát. A robotkar is tudja, hogyan kell improvizálni, miközben elemzi a ritmust, amelyben a dobos játszik.
Tökéletesen utánozza a valódi élőlényeket, akik velünk élnek bolygónkon. Egy ilyen robot elkészítése nem nehéz, de szükség van a vágyra és bizonyos készségekre az elektronika területén.
Anyagok és eszközök:
- egy darab rézdrót;
- két ujjelem tartó;
- két monolit kerámia kondenzátor, egyenként 0,22 mF;
- egy ellenállás 3,3M névleges értékkel;
- 74NST240 oktális inverter chip nyolc csatornához (egy);
- 20 tűs DIP 74XX240 vagy 74XX245 (egy);
- szervomotor (egy);
- kapcsoló;
- egy műanyag fogaskerék;
- vezeték csatlakozó.
Gyártási folyamat:
Első lépés. Fogaskerék előkészítés
Vegyünk egy műanyag fogaskereket, és vágjuk két azonos részre. Ezután el kell távolítania a kürtöt, és ragasztóval rögzíteni kell egy félkörhöz.


Második lépés. Motor átalakítás
A szervomotort úgy kell módosítani, hogy csak forgásra működjön. Ezután rá kell ragasztani rézdrót a képen látható módon.
Ebben a szakaszban is szüksége lesz egy megfelelő átmérőjű műanyag csőre, amelyet félkörre kell ragasztani. A szervomotor kürtje ezt követően az eredeti helyére kerül. A rézhuzalra akkor fel kell tenni műanyag cső. Ebben a szakaszban a munka befejezettnek tekinthető.



Harmadik lépés. Robotmancsok készítése és telepítése
Lábnak használták rézdrót, a képen látható módon kell hajlítani. Ezután a szerző a mancsokat a félkörökre ragasztja. Most már a szervomotorra is ragaszthat akkumulátortartókat.




Negyedik lépés. Elektronikával való munka
Talán ez a legnehezebb és legdöntőbb pillanat. A teljes rendszert pontosan az ábrán látható módon kell csatlakoztatni. A csatlakoztatás után a robot azonnal készen áll és tesztelhető.



A mancsok szögének megváltoztatásával elérheti különféle jellemzők egy robottól. Megteheti gyorsabban vagy lassabban is. A robotot fel is szerelheti további elemek irányítsa például a bajuszt, amellyel meghatározza az akadályt. A robot felszerelhető szemekkel is LED-ek formájában, így még valósághűbb egy élőlényhez hasonló kép.
Egy ilyen robotot sík felületen kell futtatnia. A lábak elcsúszásának elkerülése érdekében kambrikot lehet a végükre tenni.
A sétálórobotok olyan robotok, amelyek állatok vagy rovarok mozgását utánozzák. A robotok általában mechanikus lábakat használnak a mozgáshoz. A láb segítségével történő mozgás több millió éves múltra tekint vissza. Ezzel szemben a kerekes helyváltoztatás története 10 000 és 7 000 évvel ezelőtt kezdődött. A kerekekkel történő utazás meglehetősen hatékony, de viszonylag sík utakat igényel. Elég egy város vagy külvárosának légifelvételére nézni, hogy észrevegyük az összefonódó utak hálózatát.
Sétálórobotok létrehozásának célja
A gyalogos robotok olyan egyenetlen terepen is mozoghatnak, amelyhez a hagyományos kerekes járművek hozzáférhetetlenek. Hasonló célból általában járórobotokat készítenek.
Az élet utánzása
A tökéletes sétálórobotok rovarok, rákfélék és néha az emberek mozgását utánozzák. A kétlábú robottervek ritkák, mert megvalósításuk összetett mérnöki megoldásokat igényel. Azt tervezem, hogy a következő könyvemben áttekintem a kétlábú robotprojektet kód név Pic-Robotics. Ebben a fejezetben egy hatlábú sétálórobotot építünk.
Hat láb - állvány járás
A hatlábú modell segítségével bemutathatjuk a híres "állványos" járást, vagyis azt a háromlábú járást, amelyet a legtöbb lény használ. A következő rajzokon a sötét kör azt jelenti, hogy a láb szilárdan a talajon van, és megtámasztja a lény súlyát. A világos kör azt jelenti, hogy a láb felfelé van és mozgásban van.
ábrán A 11.1 „álló” helyzetünket mutatja. Minden láb a földön nyugszik. Lényünk az „álló” helyzetből úgy dönt, hogy előre megy. Egy lépés megtételéhez felemeli három lábát (lásd a világos köröket a 11.2. ábrán), súlyát a fennmaradó három lábra (sötét körök) támasztva. Vegye figyelembe, hogy a súlyt tartó lábak (tömör körök) állvány (háromszög) alakban vannak elrendezve. Az ilyen helyzet stabil, és lényünk nem tud elesni. A másik három láb (világos körök) előre tud és mozog is. ábrán A 11.3 a felemelt lábak mozgási pillanatát mutatja. Ezen a ponton a lény súlya állóról mozgó lábakra tolódik el (lásd 11.4. ábra). Vegye figyelembe, hogy a lény súlyát továbbra is a támasztó lábak háromszög alakú elrendezése tartja. Ezután a másik három láb ugyanúgy átrendeződik, és a ciklus megismétlődik. Ezt a közlekedési módot ún háromlábú járás, mivel a lény testének súlyát minden időpillanatban a támasztó lábak háromszöghelyzete támogatja.
Rizs. 11.1. Háromlábú járás. Kezdő pozíció

Rizs. 11.2. Háromlábú járás, első lépés előre

Rizs. 11.3. Háromlábú járás, második mozgás, a súlypont eltolása

Rizs. 11.4. Háromlábú járás, harmadik mozdulat
Sétáló robot építése
Számos kis óraszerkezetű sétálójáték modell létezik. Az ilyen játék "gyalogosok" bütykös mechanizmusok segítségével mozgatják lábukat fel-le és előre-hátra. Bár az ilyen kialakítások meglehetősen képesek "sétálni", és vannak, akik ezt mozgékonyan teszik, célunk egy olyan sétáló robot létrehozása, amely nem használ bütykös mechanizmusokat a séta szimulálására.
Építünk egy robotot, amely utánozza az állvány járását. Az ebben a fejezetben leírt robot mozgatásához három szervóra van szükség. Vannak más hat- és négylábú sétálórobot-modellek is, amelyek nagyobb szabadságot igényelnek a lábukban. Ennek megfelelően a jelenlét több A szabadságfokokhoz több vezérlőmechanizmus szükséges az egyes lábakhoz. Ha szervomotorokat használnak erre a célra, akkor két, három vagy akár négy motorra lesz szükség minden lábhoz.
Ennyi szervomotor (hajtás) szükségességét az határozza meg, hogy legalább két szabadságfok szükséges. Az egyik a láb le- és emelésére szolgál, a másik pedig az előre-hátra mozgatására.
Sétáló robot három szervóval
A készülő sétálórobot kompromisszum a tervezésben és a tervezésben, és mindössze három szervóra van szüksége. Azonban ebben az esetben is állványos járással biztosítja a mozgást. Kialakításunk három könnyűsúlyú HS300 szervomotort (nyomaték 1,3 kgf) és egy 16F84-04 mikrokontrollert használ.
A készülék működése
Mielőtt hozzákezdenénk a robot felépítéséhez, nézzük meg az ábrán látható kész robotot. 11.5, és elemezze a robot mozgását. Az ebben a kialakításban használt állványjárás nem az egyetlen lehetséges.

Rizs. 11.5. Hatlábú sétáló készen áll az útra
A robot elé két szervomotor van rögzítve. Mindegyik szervomotor a robot megfelelő oldaláról vezérli az első és hátsó lábak mozgását. Az első láb közvetlenül a szervo rotorhoz van rögzítve, és képes előre-hátra lendíteni. A hátsó láb húzóerővel kapcsolódik az első lábhoz. A tapadás lehetővé teszi a hátsó láb számára, hogy kövesse az első láb előre és hátra mozgását. A két központi lábat egy harmadik szervomotor vezérli. Ez a szervó a középső lábakat a hosszanti tengely mentén 20°-30°-kal az óramutató járásával megegyezően és azzal ellentétes irányban elforgatja, ami a robotot jobbra vagy balra dönti.
A lábmeghajtó mechanizmussal kapcsolatos információk felhasználásával most meglátjuk, hogyan fog mozogni a robotunk. Nézzük az ábrát. 11.6. Nyugalmi helyzetből kezdjük. Minden kör jelöli a láb helyzetét. Az előző esethez hasonlóan a sötét körök a támasztó lábak helyzetét mutatják. Kérjük, vegye figyelembe, hogy nyugalmi helyzetben a középső lábak nem támaszkodnak. Ezek a lábak 3 mm-rel rövidebbek, mint az első és hátulsó lábak.

Rizs. 11.6. Hatlábú mozgásfázisok
Az A helyzetben a központi lábak az óramutató járásával megegyező irányban körülbelül 20°-os szöget zárnak be a középső helyzethez képest. Emiatt a robot jobbra billen. Ebben a helyzetben a robot súlyát a jobb első és hátsó lába, valamint a bal középső láb tartja. Ez a fent leírt szabványos „állvány” pozíció. Mivel a bal első és a bal hátsó lábak "levegőben" vannak, előre mozgathatók, ahogy a 11.6. ábra B pozíciójában látható.
C helyzetben a központi lábak az óramutató járásával ellentétes irányban körülbelül 20°-os szöget zárnak be a középső helyzethez képest. Emiatt a robot balra dől. Ebben a helyzetben a robot súlya megoszlik a bal első és hátsó lábak, valamint a jobb középső lábak között. Most a jobb első és hátsó lábak tehermentesek, és előre mozgathatók a poz. D ábra. 11.6.
E helyzetben a központi lábak visszatérnek a középső helyzetbe. Ebben a helyzetben a robot egyenesen "áll", és csak az első és a hátsó lábakon nyugszik. F helyzetben az első és a hátsó lábak egyszerre mozdulnak hátra, a robot pedig előre. Ezután a mozgás ciklusa megismétlődik.
Ez volt az első sétamódszer, amit megpróbáltam reprodukálni, és ez a rendszer működik. Kidolgozhat, finomíthat és megszerkeszthet más járásmintákat, amelyekkel kísérletezhet. Rád bízom, hogy hogyan járj hátrafelé (tolatásban) és hogyan kanyarodj jobbra-balra. Továbbra is tovább fogom fejleszteni ezt a robotot azáltal, hogy érzékelőket adok hozzá a falak és az akadályok jelenlétéhez, valamint a vissza- és fordulási módokhoz.
Robot tervezés
A robot „testének” alapjához egy 200x75x0,8 mm méretű alumíniumlapot vettem. A szervomotorok a lemez elejére vannak rögzítve (lásd a 11.7. ábrát). A szervomotorok furatainak elrendezését át kell másolni a rajzról és át kell vinni az alumínium lapra. Az ilyen másolás biztosítja a szervomotorok felszereléséhez szükséges furatok helyzetének pontosságát. Négy 4,3 mm átmérőjű furat található kissé a középvonal mögött, és a középső szervo felszerelésére szolgálnak. Ez a négy lyuk jobbra van eltolva. Ezt úgy kell megtenni, hogy a központi szervomotor karimája pontosan a "test" közepén legyen. A két hátsó furat a hátsó lábak mozgatható rögzítésére szolgál.

Rizs. 11.7. A "test" alapja
Központi lyukasztót kell használni a fúráshoz szükséges furatok középpontjának megjelölésére. Ellenkező esetben lyukak fúrásakor a fúró „elveszhet”. Ha nincs ütésed, jó helyettesítőként használhatsz egy éles szöget.
A robot lábai 12 mm széles és 3 mm vastag alumínium szalagból készülnek (lásd 11.8. ábra). Az elülső lábakban négy lyuk van fúrva. A hátsó lábakban két lyuk van fúrva: az egyik a mozgatható, a másik a húzótartóhoz. Vegye figyelembe, hogy a hátsó lábak 6 mm-rel rövidebbek, mint az első. Ez annak a ténynek köszönhető, hogy figyelembe kell venni a szervomotor karima magasságát, amelyhez az első lábak vannak rögzítve. általános szinten tányérok. A hátsó lábak lerövidítése kiegyenlíti a platform helyzetét.

Rizs. 11.8. Első és hátsó láb kialakítása
Fúrás után szükséges lyukak végig kell hajlítani az alumínium szalagot kívánt formát. Rögzítse a csíkot egy satuba a fúrt furatok oldaláról 70 mm távolságban. Nyomja meg a lemezt és hajlítsa meg 90°-os szögben. A legjobb, ha a lemezt közvetlenül a satupofák mellé nyomjuk. Ez a lemezt 90°-os szögben meghajlítja anélkül, hogy a láb „alsó” része meggörbülne.
A központi lábak egyetlen darab alumíniumból készülnek (lásd a 11.9. ábrát). A robothoz rögzítve a központi lábak 3 mm-rel rövidebbek, mint az első és a hátsó lábak. Így középső helyzetben nem érintik a talajt. Ezek a lábak a robot jobbra és balra billentésére szolgálnak. Amikor a központi szervót elforgatják, a lábak körülbelül ±20°-os szögben megdöntik a robotot.

Rizs. 11.9. Közepes lábak
A központi lábak 3x12x235 mm méretű alumínium szalagban történő gyártása során először három központi furatot fúrnak a szervomotor karimájához. Ezután az alumínium szalagot egy satuba rögzítik, és a satu pofák a felső él mentén rögzítik a szalagot 20 mm távolságra a szalag közepétől. Rögzítse a csíkot fogóval a satu felső szélétől kb. 12 mm távolságra. A fogó bilincsét tartva óvatosan csavarja el az alumíniumszalagot 90°-os szögben. Elég lassan hajtsa végre a műveletet, különben könnyen eltörheti a tányért. Hasonló módon csavarja meg a tányért a másik oldalon.
Ha a 90°-os csavarás befejeződött, hajlítsa meg a lemezt további 90°-kal két helyen, ahogyan az első és hátsó lábaknál is tettük.
Szervomotorok szerelése
Az első szervók 3 mm-es műanyag csavarokkal és anyákkal vannak rögzítve az alumínium alapra. A műanyag csavarokat azért választottam, mert enyhén hajlíthatóak, hogy kompenzálják a lemezbe fúrt furatok és a szervo rögzítő furatok helyzetének kisebb eltéréseit.
A lábak a szervomotor műanyag karimájához vannak rögzítve. Ehhez 2 mm-es csavarokat és anyákat használtam. Amikor a karimát a szervo tengelyre rögzíti, ügyeljen arra, hogy a középső merőleges helyzetből mindkét láb ugyanolyan szögben tudjon lendülni előre-hátra.
Vonóerő kialakítása
Az elülső és hátsó lábak közötti összekötő egy 3 mm-es menetes rúdból készül (lásd 11.10. ábra). Az eredeti kivitelben a rúd hossza középponttól középpontig 132 mm. A link a robot elülső és hátsó lábán lévő lyukakba van beillesztve, és néhány anyával rögzíthető.

Rizs. 11.10. Részletes rajz a csuklópántról és a csatlakozásról
A robot hátsó lábait az alaphoz kell rögzíteni, mielõtt a kar felszerelhetõ. A hátsó láb rögzítése 9,5 mm-es menetes szegecsből és rögzítőcsavarból készül. A láb részletes rögzítése az ábrán látható. 11.10. Helyezzen műanyag alátéteket az alap alá, hogy kitöltse az alap alja és a csavarfej közötti teret. Ez a kialakítás biztosítja a láb rögzítését az alaphoz anélkül, hogy "kilógna". Műanyag alátétek használhatók a súrlódás csökkentésére. Ne használjon túl sok alátétet - ez túlzott nyomást gyakorol az alap talpfelületére. A lábnak elég szabadon kell forognia az ízületnél. ábrán 11.11 és 11.12 egy részben összeszerelt hatlábú robot fényképei.

Rizs. 11.11. Hatszög – alulnézet. Elöl két szervomotor

Rizs. 11.12. Részben összeszerelt hatszögletű, két első szervóval
Központi szervomotor
A középső szervomotor felszereléséhez két L-konzolra van szükség (lásd: 11.13. ábra). Fúrjon megfelelő lyukakat az alumínium szalagokba, és hajlítsa meg őket 90°-os szögben, hogy kapcsokat képezzen. Rögzítse a két L-konzolt a középső szervóra műanyag csavarokkal és anyákkal (lásd: 11.14. ábra). Ezután rögzítse a központi szervoszerelvényt az alap aljához. Igazítsa az alapon lévő négy lyukat az L-tartók tetején lévő lyukakhoz. Rögzítse az alkatrészeket műanyag csavarokkal és anyákkal. ábrán 11.15 és 11.16 egy hatlábú robot felülről és alulról készült fényképei.

Rizs. 11.13. A központi szervomotor konzolja

Rizs. 11.14. Központi motor szerelvény tartókonzolokkal és középső lábakkal

Rizs. 11.15. Hatszög - alulnézet három szervóval

Rizs. 11.16. Hatszög összeszerelve. A szerkezet készen áll az elektronikus vezérlés szerelésére
Elektromos rész
ábrán A 11.17 ábra a szervomotorok PIC mikrokontrollerrel történő vezérlésének diagramját mutatja. A szervomotorok és a mikrokontroller 6 V-os elemmel működnek, a 6 V-os elemtartóban 4 db AA cella található. A mikrokontroller áramkörét egy kis kenyérsütőlapra szerelik össze. Az elemtartó rekesz és az áramkör az alumínium alap tetejére van rögzítve. A 11.5. ábra mutatja kész építkezés mozgásra kész robot.

Rizs. 11.17. kördiagramm hatlábú robotvezérlés
Program a mikrokontrollerhez
A 16F84 mikrokontroller három szervomotor működését vezérli. Elérhetőség egy nagy szám A nem használt I/O buszok és a program számára fenntartott hely lehetőséget ad a robot alapmodelljének fejlesztésére, módosítására.
PICBASIC program
„Hatlábú sétálórobot
„Kapcsolatok
'Bal szervócsap RB1
'Jobb szervócsap RB2
„Billentő szervócsap RB0
– Csak előre
ha B0 = 1-60
pulsout 0, 155 ‘Döntés az óramutató járásával megegyező irányba, jobb oldallal felfelé
pulsout 1, 145 ‘Bal láb a helyén
pulsout 2, 145 ‘Jobb láb előre
ha B0 = 1-60
pulsout 0, 190 ‘Döntés az óramutató járásával ellentétes irányba, bal oldallal felfelé
pulsout 1, 200 ‘Bal láb előre
pulsout 2, 145 ‘A jobb lábak maradjanak előre
ha B0 = 1-től 15-ig
pulsout 1, 200 ‘Bal láb tartsa előre
pulsout 2,145 ‘A jobb lábak tartsanak előre
ha B0 = 1-60
pulsout 0, 172 ‘Középpozíció, nincs lejtés
pulsout 1, 145 ‘A bal lábát tegyük hátra
pulsout 2, 200 ‘Hozd hátra a jobb lábat
Nem minden szervó reagál ugyanúgy a pulsout parancsra. Lehetséges, hogy egy robot létrehozásához szervókat vásárol, amelyek jellemzői kissé eltérnek az általam használtaktól. Ebben az esetben vegye figyelembe, hogy a szervo rotor helyzetét meghatározó pulsout parancs paramétereit módosítani kell. Ebben az esetben ki kell választania az impulzuskimeneti paraméterek számértékeit, amelyek megfelelnek a hatlábú robottervezésben használt szervomotor típusának.
Ez a PICBASIC program lehetővé teszi, hogy a robot csak bemozduljon előre irány, azonban a program egy kis változtatásával a tervező visszamozgathatja a robotot, és jobbra-balra kanyarodhat. Több érzékelő felszerelése tájékoztathatja a robotot az akadályok jelenlétéről.
A sétálórobot tervezési alkatrészeinek listája
Szervo motorok
Mikrokontrollerek 16F84
alumínium szalagok
alumínium lemez
Rudak és anyák 3 mm-es menettel
Műanyag csavarok, anyák és alátétek
Alkatrészek rendelhetők innen:
Azt is ajánljuk
 Mi a neve a játékban forgó pénzösszegnek? A modern monetáris rendszer egy pénzügyi piramis
Mi a neve a játékban forgó pénzösszegnek? A modern monetáris rendszer egy pénzügyi piramis
 Hogyan nevezzünk el egy lovat: kiválasztunk egy megfelelő becenevet
Hogyan nevezzünk el egy lovat: kiválasztunk egy megfelelő becenevet
 Hogyan nevezzünk el egy lovat: kiválasztunk egy megfelelő becenevet
Hogyan nevezzünk el egy lovat: kiválasztunk egy megfelelő becenevet
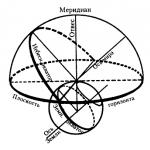 Az égi gömb pontja a megfigyelő feje felett
Az égi gömb pontja a megfigyelő feje felett
 közönséges páva (indiai)
közönséges páva (indiai)
 Mi a neve a hímnek és a nősténynek
Mi a neve a hímnek és a nősténynek