Mouvement rectiligne et curviligne. Mouvement rectiligne et mouvement le long de la circonférence d'un point matériel
Si l'accélération point matériel est toujours égal à zéro, alors la vitesse de son mouvement est constante en amplitude et en direction. La trajectoire dans ce cas est une ligne droite. Le mouvement d'un point matériel dans les conditions formulées est appelé rectiligne uniforme. Avec un mouvement rectiligne, la composante centripète de l'accélération est absente, et comme le mouvement est uniforme, la composante tangentielle de l'accélération est nulle.
Si l'accélération reste constante dans le temps (), alors le mouvement est dit également variable ou inégal. Un mouvement également variable peut être uniformément accéléré si a > 0, et également lent si a< 0. В этом случае мгновенное ускорение оказывается равным среднему ускорению за любой промежуток времени. Тогда из формулы (1.5) следует а = Dv/Dt = (v-v o)/t, откуда
![]() (1.7)
(1.7)
où v o - vitesse initiale à t=0, v - vitesse au temps t.
D'après la formule (1.4) ds = vdt. Puis 
Parce que pour Mouvement uniforme a=const, alors
![]() (1.8)
(1.8)
Les formules (1.7) et (1.8) sont valables non seulement pour un mouvement rectiligne uniformément variable (non uniforme), mais aussi pour chute libre corps et pour le mouvement d'un corps projeté vers le haut. Dans les deux derniers cas, a \u003d g \u003d 9,81 m / s 2.
Pour un mouvement rectiligne uniforme v = v o = const, a = 0, et la formule (1.8) prend la forme s = vt.
Le mouvement circulaire est le cas le plus simple de mouvement curviligne. La vitesse v de déplacement d'un point matériel le long d'un cercle est dite linéaire. Avec une vitesse linéaire modulo constante, le mouvement dans un cercle est uniforme. Il n'y a pas d'accélération tangentielle d'un point matériel lors d'un mouvement uniforme le long d'un cercle, et t \u003d 0. Cela signifie qu'il n'y a pas de changement de vitesse modulo. Le changement du vecteur vitesse linéaire dans la direction est caractérisé par une accélération normale, et n ¹ 0. En chaque point de la trajectoire circulaire, le vecteur a n est dirigé le long du rayon vers le centre du cercle.
et n \u003d v 2 / R, m / s 2. (1.9)
L'accélération résultante est bien centripète (normale), puisqu'à Dt->0 Dj tend également vers zéro (Dj->0) et les vecteurs et seront dirigés selon le rayon du cercle jusqu'à son centre.
Avec la vitesse linéaire v Mouvement uniforme un point matériel le long d'un cercle est caractérisé par une vitesse angulaire. La vitesse angulaire est le rapport de l'angle de rotation Dj du vecteur rayon sur l'intervalle de temps pendant lequel cette rotation s'est produite,
Rad/s (1.10)
Pour un mouvement irrégulier, le concept de vitesse angulaire instantanée est utilisé
![]() .
.
L'intervalle de temps t, pendant lequel le point matériel fait un tour complet autour de la circonférence, est appelé période de rotation, et l'inverse de la période est la fréquence de rotation: n \u003d 1 / T, s -1.
Pendant une période, l'angle de rotation du rayon vecteur d'un point matériel est de 2π rad, donc Dt \u003d T, d'où la période de rotation, et la vitesse angulaire est fonction de la période ou de la fréquence de rotation
On sait qu'avec un mouvement uniforme d'un point matériel le long d'un cercle, le chemin parcouru par celui-ci dépend du temps de déplacement et de la vitesse linéaire: s = vt, m.Le chemin parcouru par un point matériel le long d'un cercle de rayon R , pour une période, est égal à 2πR. Le temps nécessaire pour cela est égal à la période de rotation, c'est-à-dire t \u003d T. Et, par conséquent,
2πR = vT, m (1.11)
et v = 2nR/T = 2πnR, m/s. Puisque l'angle de rotation du rayon vecteur d'un point matériel pendant la période de rotation T est égal à 2π, alors, d'après (1.10), avec Dt = T, . En remplaçant dans (1.11), nous obtenons et à partir de là nous trouvons la relation entre la vitesse linéaire et la vitesse angulaire
La vitesse angulaire est une grandeur vectorielle. Le vecteur vitesse angulaire est dirigé depuis le centre du cercle le long duquel le point matériel se déplace avec une vitesse linéaire v, perpendiculaire au plan du cercle selon la règle de la vis droite.
À mouvement inégal d'un point matériel le long d'un cercle, les vitesses linéaire et angulaire changent. Par analogie avec accélération linéaire dans ce cas, la notion d'accélération angulaire moyenne et instantanée est introduite : ![]() . La relation entre les accélérations tangentielle et angulaire a la forme .
. La relation entre les accélérations tangentielle et angulaire a la forme .
À l'aide de cette leçon, vous pourrez étudier de manière indépendante le sujet «Mouvement rectiligne et curviligne. Le mouvement d'un corps dans un cercle avec une vitesse modulo constante. Premièrement, nous caractérisons le mouvement rectiligne et curviligne en considérant comment le vecteur vitesse et la force appliquée au corps sont liés dans ces types de mouvement. Ensuite, considérez cas particulier lorsque le corps se déplace en cercle avec une vitesse modulo constante.
Dans la leçon précédente, nous avons examiné des questions liées à la loi la gravité. Le sujet de la leçon d'aujourd'hui est étroitement lié à cette loi, nous allons nous tourner vers le mouvement uniforme d'un corps dans un cercle.
Plus tôt nous avons dit que mouvement - il s'agit d'un changement de position d'un corps dans l'espace par rapport à d'autres corps au fil du temps. Le mouvement et la direction du mouvement sont caractérisés, entre autres, par la vitesse. Le changement de vitesse et le type de mouvement lui-même sont associés à l'action d'une force. Si une force agit sur un corps, alors le corps change de vitesse.
Si la force est dirigée parallèlement au mouvement du corps, alors un tel mouvement sera directe(Fig. 1).
Riz. une. Mouvement rectiligne
curviligne il y aura un tel mouvement lorsque la vitesse du corps et la force appliquée à ce corps sont dirigées l'une par rapport à l'autre selon un certain angle (Fig. 2). Dans ce cas, la vitesse changera de direction.

Riz. 2. Mouvement curviligne
Alors, à mouvement rectiligne le vecteur vitesse est dirigé dans le même sens que la force appliquée au corps. MAIS mouvement curviligne est un tel mouvement lorsque le vecteur vitesse et la force appliquée au corps sont situés à un certain angle l'un par rapport à l'autre.
Considérons un cas particulier de mouvement curviligne, lorsque le corps se déplace en cercle avec une vitesse constante en valeur absolue. Lorsqu'un corps se déplace en cercle à une vitesse constante, seule la direction de la vitesse change. Modulo il reste constant, mais la direction de la vitesse change. Un tel changement de vitesse entraîne la présence d'une accélération dans le corps, appelée centripète.

Riz. 6. Mouvement le long d'un chemin courbe
Si la trajectoire du mouvement du corps est une courbe, alors elle peut être représentée comme un ensemble de mouvements le long d'arcs de cercles, comme le montre la Fig. 6.

Sur la fig. 7 montre comment la direction du vecteur vitesse change. La vitesse lors d'un tel mouvement est dirigée tangentiellement au cercle le long de l'arc dont le corps se déplace. Ainsi, sa direction change constamment. Même si la vitesse modulo reste constante, un changement de vitesse entraîne une accélération :
![]()
Dans ce cas accélération sera dirigé vers le centre du cercle. C'est pourquoi on l'appelle centripète.
Pourquoi l'accélération centripète est-elle dirigée vers le centre ?
Rappelons que si un corps se déplace le long d'une trajectoire courbe, alors sa vitesse est tangentielle. La vitesse est une grandeur vectorielle. Un vecteur a une valeur numérique et une direction. La vitesse à laquelle le corps se déplace change continuellement de direction. C'est-à-dire que la différence de vitesse à différents moments ne sera pas égale à zéro (), contrairement au mouvement uniforme rectiligne.
Donc, nous avons un changement de vitesse sur une certaine période de temps. Relation à est l'accélération. Nous arrivons à la conclusion que, même si la vitesse ne change pas en valeur absolue, un corps qui effectue un mouvement uniforme dans un cercle a une accélération.
Où est dirigée cette accélération ? Considérez la Fig. 3. Certains corps se déplacent curvilignement (en arc de cercle). La vitesse du corps aux points 1 et 2 est tangentielle. Le corps se déplace uniformément, c'est-à-dire que les modules des vitesses sont égaux : , mais les directions des vitesses ne coïncident pas.

Riz. 3. Mouvement du corps en cercle
Soustrayez la vitesse de et obtenez le vecteur . Pour ce faire, vous devez connecter les débuts des deux vecteurs. En parallèle, nous déplaçons le vecteur au début du vecteur . Nous construisons un triangle. Le troisième côté du triangle sera le vecteur de différence de vitesse (Fig. 4).

Riz. 4. Vecteur de différence de vitesse
Le vecteur est dirigé vers le cercle.
Considérons un triangle formé par les vecteurs vitesse et le vecteur différence (Fig. 5).

Riz. 5. Triangle formé par des vecteurs de vitesse
Ce triangle est isocèle (les modules de vitesse sont égaux). Donc les angles à la base sont égaux. Écrivons l'équation de la somme des angles d'un triangle :
![]()
Découvrez où l'accélération est dirigée à un point donné de la trajectoire. Pour ce faire, nous commençons à rapprocher le point 2 du point 1. Avec une diligence aussi illimitée, l'angle tendra vers 0 et l'angle - vers. L'angle entre le vecteur de changement de vitesse et le vecteur de vitesse lui-même est . La vitesse est dirigée tangentiellement et le vecteur de changement de vitesse est dirigé vers le centre du cercle. Cela signifie que l'accélération est également dirigée vers le centre du cercle. C'est pourquoi cette accélération est appelée centripète.
Comment trouver l'accélération centripète ?
Considérez la trajectoire le long de laquelle le corps se déplace. Dans ce cas, il s'agit d'un arc de cercle (Fig. 8).

Riz. 8. Mouvement du corps en cercle
La figure montre deux triangles : un triangle formé par les vitesses, et un triangle formé par les rayons et le vecteur déplacement. Si les points 1 et 2 sont très proches, alors le vecteur de déplacement sera le même que le vecteur de chemin. Les deux triangles sont isocèles avec les mêmes angles au sommet. Donc les triangles sont semblables. Cela signifie que les côtés correspondants des triangles sont dans le même rapport :
Le déplacement est égal au produit de la vitesse par le temps : . Remplacer cette formule, vous pouvez obtenir l'expression suivante pour l'accélération centripète :
Vitesse angulaire dénoté lettre grecque oméga (ω), il indique l'angle de rotation du corps par unité de temps (Fig. 9). C'est la grandeur de l'arc, en degrés, parcouru par le corps en un certain temps.

Riz. 9. Vitesse angulaire
Notons que si solide tourne, alors la vitesse angulaire pour tous les points de ce corps sera une valeur constante. Le point est plus proche du centre de rotation ou plus éloigné - cela n'a pas d'importance, c'est-à-dire qu'il ne dépend pas du rayon.
L'unité de mesure dans ce cas sera soit des degrés par seconde (), soit des radians par seconde (). Souvent, le mot "radian" n'est pas écrit, mais simplement écrit. Par exemple, trouvons quelle est la vitesse angulaire de la Terre. La terre fait un tour complet en une heure, et dans ce cas on peut dire que la vitesse angulaire est égale à :
![]()
Faites également attention à la relation entre les vitesses angulaires et linéaires :
La vitesse linéaire est directement proportionnelle au rayon. Plus le rayon est grand, plus la vitesse linéaire est grande. Ainsi, en nous éloignant du centre de rotation, nous augmentons notre vitesse linéaire.
Il convient de noter que le mouvement dans un cercle à vitesse constante est un cas particulier de mouvement. Cependant, le mouvement circulaire peut également être irrégulier. La vitesse peut non seulement changer de direction et rester la même en valeur absolue, mais aussi changer de valeur, c'est-à-dire qu'en plus du changement de direction, il y a aussi un changement dans le module de vitesse. Dans ce cas, nous parlons du soi-disant mouvement circulaire accéléré.
Qu'est-ce qu'un radian ?
Il existe deux unités pour mesurer les angles : les degrés et les radians. En physique, en règle générale, la mesure en radians d'un angle est la principale.
Construisons un angle central , qui repose sur un arc de longueur .
Le mouvement est un changement de position
corps dans l'espace par rapport aux autres
corps au fil du temps. Mouvement et
la direction du mouvement est caractérisée par
y compris la vitesse. Changement
la vitesse et le type de mouvement lui-même sont associés à
l'action de la force. Si le corps est affecté
force, le corps change de vitesse.
mouvement du corps, dans une direction, alors ce
le mouvement sera droit. Un tel mouvement sera curviligne,
lorsque la vitesse du corps et la force appliquée à
ces corps sont dirigés l'un par rapport à l'autre
ami sous un certain angle. Dans ce cas
la vitesse va changer
direction. Ainsi, pour une rectiligne
mouvement, le vecteur vitesse est dirigé vers celui
du même côté que la force appliquée à
corps. Et curviligne
le mouvement est le mouvement
lorsque le vecteur vitesse et la force,
attaché au corps, situé sous
certains angles les uns par rapport aux autres.
accélération centripète
CENTRIPEACCÉLÉRATION
Prenons un cas particulier
mouvement curviligne lorsque le corps
se déplace en cercle avec une constante
module de vitesse. Quand le corps bouge
en cercle à vitesse constante, puis
seul le sens de la vitesse change. Par
modulo, il reste constant, et
le sens de la vitesse change. Tel
changement de vitesse entraîne
corps d'accélération, qui
dit centripète. Si la trajectoire du corps est
courbe, elle peut être représentée comme
ensemble de mouvements le long d'arcs
cercles, comme le montre la Fig.
3.Sur la fig. 4 montre comment la direction change
vecteur vitesse. La vitesse de ce mouvement
dirigé tangentiellement au cercle, le long de l'arc
lequel le corps est en mouvement. Ainsi, elle
la direction change constamment. Même
la vitesse modulo reste constante,
changement de vitesse entraîne l'apparition d'accélérations : Dans ce cas, l'accélération sera
dirigée vers le centre du cercle. Voilà pourquoi
elle est dite centripète.
Il peut être calculé en utilisant les éléments suivants
formule:
Vitesse angulaire. relation entre les vitesses angulaires et linéaires
VITESSE ANGULAIRE. CONNEXIONCOIN ET LIGNE
VITESSES
Quelques caractéristiques du mouvement
cercles
La vitesse angulaire est notée par le grec
avec la lettre oméga (w), il indique quel
angle fait tourner le corps par unité de temps.
C'est la magnitude de l'arc en degrés,
passé par le corps en un certain temps.
Notez que si un corps rigide tourne, alors
vitesse angulaire pour tous les points de ce corps
sera une valeur constante. point plus proche
est situé vers le centre de rotation ou plus loin -
peu importe, c'est-à-dire ne dépend pas du rayon. L'unité de mesure dans ce cas serait
soit degrés par seconde ou radians
donne moi une seconde. Souvent, le mot "radian" n'est pas écrit, mais
écrivez simplement c-1. Par exemple, trouvons
quelle est la vitesse angulaire de la terre. la terre
fait un tour complet à 360° en 24 heures, et
Dans ce cas, on peut dire que
la vitesse angulaire est égale. Notez également la relation angulaire
vitesse et vitesse de ligne :
V = w. R
Il faut noter que le mouvement
cercles à vitesse constante est un quotient
cas de mouvement. Cependant, le mouvement circulaire
peuvent également être inégaux. la vitesse peut
changer non seulement de direction et rester
identique en module, mais aussi changer à sa manière
sens, c'est-à-dire qu'en plus de changer de direction,
il y a aussi un changement dans le module de vitesse. DANS
Dans ce cas, nous parlons de la soi-disant
mouvement circulaire accéléré.
Selon la forme de la trajectoire, le mouvement peut être divisé en rectiligne et curviligne. Le plus souvent, vous rencontrerez des mouvements curvilignes lorsque le chemin est représenté sous forme de courbe. Un exemple de ce type de mouvement est la trajectoire d'un corps projeté en biais par rapport à l'horizon, le mouvement de la Terre autour du Soleil, des planètes, etc.
Image 1 . Trajectoire et déplacement en mouvement curviligne
Définition 1Mouvement curviligne appelé le mouvement, dont la trajectoire est une ligne courbe. Si le corps se déplace le long d'une trajectoire courbe, alors le vecteur de déplacement s → est dirigé le long de la corde, comme le montre la figure 1, et l est la longueur de la trajectoire. La direction de la vitesse instantanée du corps est tangentielle au même point de la trajectoire où dans ce moment un objet en mouvement est localisé, comme le montre la figure 2.

Figure 2. Vitesse instantanée en mouvement curviligne
Définition 2
Mouvement curviligne d'un point matériel appelé uniforme lorsque le module de vitesse est constant (mouvement dans un cercle), et uniformément accéléré avec une direction et un module de vitesse changeants (mouvement d'un corps projeté).
Le mouvement curviligne est toujours accéléré. Cela s'explique par le fait que même avec un module de vitesse inchangé, mais une direction modifiée, il y a toujours une accélération.
Afin d'étudier le mouvement curviligne d'un point matériel, deux méthodes sont utilisées.
Le chemin est divisé en sections distinctes, sur chacune desquelles il peut être considéré comme rectiligne, comme le montre la figure 3.
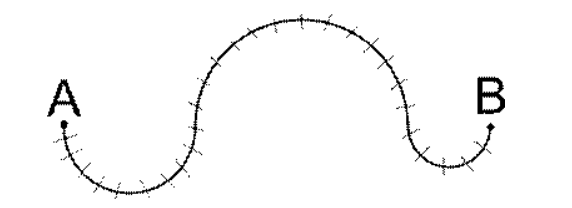
Figure 3. Division du mouvement curviligne en translation
Maintenant, pour chaque section, vous pouvez appliquer la loi du mouvement rectiligne. Ce principe est accepté.
La méthode de solution la plus pratique est considérée comme la représentation du chemin comme un ensemble de plusieurs mouvements le long d'arcs de cercles, comme le montre la figure 4. Le nombre de partitions sera bien moindre que dans la méthode précédente, de plus, le mouvement autour du cercle est déjà curviligne.

Figure 4. Partitionnement d'un mouvement curviligne en mouvements le long d'arcs de cercles
Remarque 1
Pour enregistrer un mouvement curviligne, il faut pouvoir décrire un mouvement le long d'un cercle, représenter un mouvement arbitraire sous forme d'ensembles de mouvements le long des arcs de ces cercles.
L'étude du mouvement curviligne comprend la compilation d'une équation cinématique qui décrit ce mouvement et permet de déterminer toutes les caractéristiques du mouvement à partir des conditions initiales disponibles.
Exemple 1
Étant donné un point matériel se déplaçant le long d'une courbe, comme le montre la figure 4. Les centres des cercles O 1 , O 2 , O 3 sont situés sur une droite. Besoin de trouver un déménagement
s → et la longueur du chemin l lors du déplacement du point A vers B.
Solution
Par condition, on a que les centres du cercle appartiennent à une même droite, d'où :
s → = R 1 + 2 R 2 + R 3 .
Puisque la trajectoire du mouvement est la somme de demi-cercles, alors :
l ~ UNE B \u003d π R 1 + R 2 + R 3.
Répondre: s → \u003d R 1 + 2 R 2 + R 3, l ~ UNE B \u003d π R 1 + R 2 + R 3.
Exemple 2
La dépendance du chemin parcouru par le corps au temps est donnée, représentée par l'équation s (t) \u003d A + B t + C t 2 + D t 3 (C \u003d 0, 1 m / s 2, D \ u003d 0, 003 m/s 3) . Calculez au bout de combien de temps après le début du mouvement l'accélération du corps sera égale à 2 m / s 2
Solution

Réponse : t = 60 s.
Si vous remarquez une erreur dans le texte, veuillez le mettre en surbrillance et appuyer sur Ctrl+Entrée
Nous recommandons également
 Alimentation à découpage: réparation et raffinement
Alimentation à découpage: réparation et raffinement
 Télécommande de lumière
Télécommande de lumière
 Cours de natation pour les enfants de maternelle
Cours de natation pour les enfants de maternelle
 Notes pour le maître - alarmes domestiques
Notes pour le maître - alarmes domestiques
 Hélice d'horloge sur Atmega8
Hélice d'horloge sur Atmega8
 Exemples d'application d'appareils et de relais, comment choisir et connecter correctement un relais Microcontrôleur et relais circuits de commutation simples
Exemples d'application d'appareils et de relais, comment choisir et connecter correctement un relais Microcontrôleur et relais circuits de commutation simples