Le système d'équations linéaires est appelé conjoint si mti. Comment trouver une solution générale et particulière à un système d'équations linéaires
Nous continuons à traiter des systèmes d'équations linéaires. Jusqu'à présent, nous avons considéré des systèmes qui ont une solution unique. De tels systèmes peuvent être résolus de n'importe quelle manière: méthode de substitution("l'école") par les formules de Cramer, méthode matricielle, Méthode de Gauss. Cependant, deux autres cas sont répandus dans la pratique lorsque :
1) le système est incohérent (n'a pas de solutions) ;
2) le système a une infinité de solutions.
Pour ces systèmes, la plus universelle de toutes les méthodes de solution est utilisée - Méthode de Gauss. En fait, la voie « scolaire » conduira aussi à la réponse, mais en mathématiques supérieures Il est d'usage d'utiliser la méthode gaussienne d'élimination successive des inconnues. Ceux qui ne sont pas familiers avec l'algorithme de la méthode de Gauss, veuillez d'abord étudier la leçon Méthode de Gauss
Les transformations matricielles élémentaires elles-mêmes sont exactement les mêmes, la différence sera à la fin de la solution. Considérons d'abord quelques exemples où le système n'a pas de solutions (incohérents).
Exemple 1
Qu'est-ce qui attire immédiatement votre attention dans ce système ? Le nombre d'équations est inférieur au nombre de variables. Il y a un théorème qui dit : "Si le nombre d'équations du système moins de quantité variables, alors le système est incohérent ou a une infinité de solutions. Et il ne reste plus qu'à le découvrir.
Le début de la solution est assez ordinaire - nous écrivons la matrice étendue du système et, à l'aide de transformations élémentaires, nous l'amenons à une forme par étapes :

(une). Sur l'étape supérieure gauche, nous devons obtenir (+1) ou (-1). Il n'y a pas de tels nombres dans la première colonne, donc réorganiser les lignes ne fonctionnera pas. L'unité devra être organisée de manière indépendante, et cela peut se faire de plusieurs manières. Nous l'avons fait. À la première ligne, nous ajoutons la troisième ligne, multipliée par (-1).
(2). Maintenant, nous obtenons deux zéros dans la première colonne. À la deuxième ligne, nous ajoutons la première ligne multipliée par 3. À la troisième ligne, nous ajoutons la première multipliée par 5.
(3). Une fois la transformation effectuée, il est toujours conseillé de voir s'il est possible de simplifier les chaînes résultantes ? Pouvez. Nous divisons la deuxième ligne par 2, en obtenant en même temps celle souhaitée (-1) à la deuxième étape. Divisez la troisième ligne par (-3).
(4). Ajoutez la deuxième ligne à la troisième ligne. Probablement, tout le monde a prêté attention à la mauvaise ligne, qui s'est avérée à la suite de transformations élémentaires:
![]() . Il est clair qu'il ne peut en être ainsi.
. Il est clair qu'il ne peut en être ainsi.
En effet, on réécrit la matrice résultante

retour au système d'équations linéaires :

Si à la suite de transformations élémentaires une chaîne de la forme , oùλ est un nombre non nul, alors le système est incohérent (n'a pas de solutions).
Comment enregistrer la fin d'une tâche ? Vous devez écrire la phrase :
« À la suite de transformations élémentaires, une chaîne de la forme est obtenue, où λ ≠ 0 ". Réponse : "Le système n'a pas de solutions (incohérentes)."
Veuillez noter que dans ce cas, il n'y a pas de mouvement inverse de l'algorithme gaussien, il n'y a pas de solutions et il n'y a tout simplement rien à trouver.
Exemple 2
Résoudre un système d'équations linéaires 
Ceci est un exemple à faire soi-même. Solution complète et la réponse à la fin de la leçon.
Encore une fois, nous vous rappelons que votre chemin de solution peut différer de notre chemin de solution, la méthode de Gauss ne définit pas un algorithme sans ambiguïté, vous devez deviner vous-même la procédure et les actions elles-mêmes dans chaque cas.
Un autre caractéristique technique solutions : les transformations élémentaires peuvent être arrêtées Immediatement, dès qu'une ligne comme , où λ ≠ 0 . Considérer exemple conditionnel: supposons qu'après la première transformation, nous obtenons une matrice
 .
.
Cette matrice n'a pas encore été réduite à une forme étagée, mais il n'y a pas besoin de transformations élémentaires supplémentaires, puisqu'une ligne de la forme est apparue, où λ ≠ 0 . Il faut immédiatement répondre que le système est incompatible.
Lorsqu'un système d'équations linéaires n'a pas de solutions, c'est presque un cadeau pour l'étudiant, car une solution courte est obtenue, parfois littéralement en 2-3 étapes. Mais tout dans ce monde est équilibré, et le problème dans lequel le système a une infinité de solutions est juste plus long.
Exemple 3 :
Résoudre un système d'équations linéaires

Il y a 4 équations et 4 inconnues, donc le système peut soit avoir une solution unique, soit n'avoir aucune solution, soit avoir une infinité de solutions. Quoi qu'il en soit, mais la méthode de Gauss nous conduira en tout cas à la réponse. C'est sa polyvalence.
Le début est à nouveau standard. Nous écrivons la matrice étendue du système et, à l'aide de transformations élémentaires, nous l'amenons à une forme en escalier :

C'est tout, et tu avais peur.
(une). Veuillez noter que tous les nombres de la première colonne sont divisibles par 2, donc sur l'étape supérieure gauche, nous nous contentons également d'un deux. À la deuxième ligne, nous ajoutons la première ligne, multipliée par (-4). À la troisième ligne, nous ajoutons la première ligne, multipliée par (-2). À la quatrième ligne, nous ajoutons la première ligne, multipliée par (-1).
Attention! Beaucoup peuvent être tentés de la quatrième ligne soustraire Première ligne. Cela peut être fait, mais ce n'est pas nécessaire, l'expérience montre que la probabilité d'une erreur dans les calculs augmente plusieurs fois. Nous ajoutons simplement : à la quatrième ligne, nous ajoutons la première ligne, multipliée par (-1) - exactement!
(2). Les trois dernières lignes sont proportionnelles, deux d'entre elles peuvent être supprimées. Là encore, il faut montrer attention accrue, mais les droites sont-elles vraiment proportionnelles ? Pour la réassurance, il ne sera pas superflu de multiplier la deuxième ligne par (-1), et de diviser la quatrième ligne par 2, ce qui donne trois lignes identiques. Et seulement après cela, enlevez-en deux. À la suite de transformations élémentaires, la matrice étendue du système est réduite à une forme étagée :

Lorsque vous effectuez une tâche dans un cahier, il est conseillé de prendre les mêmes notes au crayon pour plus de clarté.
On réécrit le système d'équations correspondant : 
La seule solution "habituelle" du système ne sent pas ici. Mauvaise ligne où λ ≠ 0, aussi non. C'est donc le troisième cas restant - le système a une infinité de solutions.
L'ensemble infini de solutions du système est brièvement écrit sous la forme de ce que l'on appelle solution système générale.
Nous allons trouver la solution générale du système en utilisant le mouvement inverse de la méthode de Gauss. Pour les systèmes d'équations à ensemble infini de solutions, de nouveaux concepts apparaissent : "variables de base" et "variables libres". Tout d'abord, définissons quelles variables nous avons basique, et quelles variables - libre. Il n'est pas nécessaire d'expliquer en détail les termes de l'algèbre linéaire, il suffit de rappeler qu'il existe de tels variables de base et variables libres.
Les variables de base "s'assoient" toujours strictement sur les marches de la matrice. Dans cet exemple, les variables de base sont X 1 et X 3 .
Les variables libres sont tout restant variables qui n'ont pas obtenu une étape. Dans notre cas, il y en a deux : X 2 et X 4 - variables libres.
Maintenant tu as besoin toutvariables de base Express Seulement parvariables libres. Le mouvement inverse de l'algorithme gaussien fonctionne traditionnellement de bas en haut. À partir de la deuxième équation du système, nous exprimons la variable de base X 3:
Regardez maintenant la première équation : ![]() . Tout d'abord, nous y substituons l'expression trouvée :
. Tout d'abord, nous y substituons l'expression trouvée :
![]()
Il reste à exprimer la variable de base X 1 à variables libres X 2 et X 4:

Le résultat est ce dont vous avez besoin - tout variables de base ( X 1 et X 3) exprimé Seulement par variables libres ( X 2 et X 4):
![]()
En fait, la solution générale est prête :
![]() .
.
Comment écrire la solution générale ? Tout d'abord, les variables libres sont écrites dans la solution générale "seules" et strictement à leur place. Dans ce cas, les variables libres X 2 et X 4 doit être écrit en deuxième et quatrième position :
 .
.
Les expressions résultantes pour les variables de base ![]() et doit évidemment être écrit en première et troisième positions :
et doit évidemment être écrit en première et troisième positions :

De la solution générale du système, on peut trouver une infinité de décisions privées. C'est très simple. variables libres X 2 et X 4 sont appelés ainsi parce qu'ils peuvent être donnés toutes les valeurs finales. Les valeurs les plus populaires sont les valeurs nulles, car c'est le moyen le plus simple d'obtenir une solution particulière.
Remplacer ( X 2 = 0; X 4 = 0) dans la solution générale, on obtient une des solutions particulières :
![]() , ou est une solution particulière correspondant à des variables libres à valeurs ( X 2 = 0; X 4 = 0).
, ou est une solution particulière correspondant à des variables libres à valeurs ( X 2 = 0; X 4 = 0).
Les uns sont un autre couple adorable, remplaçons ( X 2 = 1 et X 4 = 1) dans la solution générale :
![]() , c'est-à-dire (-1 ; 1 ; 1 ; 1) est une autre solution particulière.
, c'est-à-dire (-1 ; 1 ; 1 ; 1) est une autre solution particulière.
Il est facile de voir que le système d'équations a une infinité de solutions puisqu'on peut donner des variables libres quelconque valeurs.
Chaque une solution particulière doit satisfaire pour chaqueéquation du système. C'est la base d'une vérification "rapide" de l'exactitude de la solution. Prenez, par exemple, une solution particulière (-1 ; 1 ; 1 ; 1) et remplacez-la dans le côté gauche de chaque équation du système d'origine :
Tout doit être réuni. Et avec toute solution particulière que vous obtenez, tout devrait également converger.
Au sens strict, la vérification d'une solution particulière trompe parfois, c'est-à-dire une solution particulière peut satisfaire chaque équation du système, et la solution générale elle-même est en fait trouvée de manière incorrecte. Par conséquent, tout d'abord, la vérification de la solution générale est plus approfondie et fiable.
Comment vérifier la solution générale résultante ![]() ?
?
Ce n'est pas difficile, mais cela demande une assez longue transformation. Il faut prendre des expressions basique variables, dans ce cas ![]() et , et substituez-les dans le côté gauche de chaque équation du système.
et , et substituez-les dans le côté gauche de chaque équation du système.
A gauche de la première équation du système :

Le côté droit de la première équation originale du système est obtenu.
A gauche de la seconde équation du système :

Le côté droit de la deuxième équation originale du système est obtenu.
Et plus loin - aux parties gauches des troisième et quatrième équations du système. Cette vérification est plus longue, mais elle garantit l'exactitude à 100 % de la solution globale. De plus, dans certaines tâches, il est nécessaire de vérifier la solution générale.
Exemple 4 :
Résolvez le système en utilisant la méthode de Gauss. Trouvez une solution générale et deux solutions privées. Vérifiez la solution globale.

Ceci est un exemple à faire soi-même. Ici, en passant, encore une fois, le nombre d'équations est inférieur au nombre d'inconnues, ce qui signifie qu'il est immédiatement clair que le système sera soit incohérent, soit aura un nombre infini de solutions.
Exemple 5 :
Résoudre un système d'équations linéaires. Si le système a une infinité de solutions, trouver deux solutions particulières et vérifier la solution générale

Décision:Écrivons la matrice étendue du système et, à l'aide de transformations élémentaires, amenons-la à une forme étagée :

(une). Ajoutez la première ligne à la deuxième ligne. À la troisième ligne, nous ajoutons la première ligne multipliée par 2. À la quatrième ligne, nous ajoutons la première ligne multipliée par 3.
(2). À la troisième ligne, nous ajoutons la deuxième ligne, multipliée par (-5). À la quatrième ligne, nous ajoutons la deuxième ligne, multipliée par (-7).
(3). Les troisième et quatrième lignes sont les mêmes, nous en supprimons une. Voici une telle beauté:

Les variables de base reposent sur des étapes, ce sont donc des variables de base.
Il n'y a qu'une seule variable libre, qui n'a pas obtenu d'étape : .
(4). Mouvement inverse. Nous exprimons les variables de base en fonction de la variable libre :
A partir de la troisième équation :
![]()
Considérez la deuxième équation et substituez-y l'expression trouvée :
![]() ,
, ![]() , ,
, ,
Considérez la première équation et substituez-y les expressions trouvées :

Ainsi, la solution générale à une variable libre X 4:
![]()
Encore une fois, comment cela s'est-il passé ? variable libre X 4 occupe seul la quatrième place qui lui revient. Les expressions résultantes pour les variables de base , , sont également à leur place.
Vérifions immédiatement la solution générale.
Nous substituons les variables de base , , dans le côté gauche de chaque équation du système :




Les membres droits correspondants des équations sont obtenus, ainsi, la solution générale correcte est trouvée.
Maintenant à partir de la solution générale trouvée ![]() on obtient deux solutions particulières. Toutes les variables sont exprimées ici par un seul variable libre x 4 . Vous n'avez pas besoin de vous casser la tête.
on obtient deux solutions particulières. Toutes les variables sont exprimées ici par un seul variable libre x 4 . Vous n'avez pas besoin de vous casser la tête.
Laisser être X 4 = 0, alors ![]() est la première solution particulière.
est la première solution particulière.
Laisser être X 4 = 1, alors ![]() est une autre solution particulière.
est une autre solution particulière.
Répondre: Décision commune : ![]() . Solutions privées :
. Solutions privées :
![]() et .
et .
Exemple 6 :
Trouver la solution générale du système d'équations linéaires.

Nous avons déjà vérifié la solution générale, la réponse est fiable. Votre ligne de conduite peut différer de la nôtre. L'essentiel est que les solutions générales coïncident. Probablement, beaucoup de gens ont remarqué un moment désagréable dans les solutions : très souvent, pendant le cours inverse de la méthode de Gauss, nous avons dû jouer avec fractions ordinaires. En pratique, cela est vrai, les cas où il n'y a pas de fractions sont beaucoup moins fréquents. Préparez-vous mentalement et, surtout, techniquement.
Arrêtons-nous sur les caractéristiques de la solution qui n'ont pas été trouvées dans les exemples résolus. La solution générale du système peut parfois inclure une constante (ou des constantes).
Par exemple, la solution générale : . Ici une des variables de base est égale à un nombre constant : . Il n'y a rien d'exotique là-dedans, ça arrive. Évidemment, dans ce cas, toute solution particulière contiendra un cinq en première position.
Rarement, mais il existe des systèmes dans lesquels le nombre d'équations est supérieur au nombre de variables. Cependant, la méthode de Gauss fonctionne dans les conditions les plus sévères. Vous devez amener calmement la matrice étendue du système à une forme échelonnée selon l'algorithme standard. Un tel système peut être incohérent, peut avoir un nombre infini de solutions et, curieusement, peut avoir une solution unique.
Nous répétons dans nos conseils - pour vous sentir à l'aise lors de la résolution d'un système à l'aide de la méthode de Gauss, vous devez remplir votre main et résoudre au moins une douzaine de systèmes.
Solutions et réponses :
Exemple 2 :
Décision:Écrivons la matrice étendue du système et, à l'aide de transformations élémentaires, amenons-la à une forme échelonnée.
Transformations élémentaires effectuées :
(1) Les première et troisième lignes ont été permutées.
(2) La première ligne a été ajoutée à la deuxième ligne, multipliée par (-6). La première ligne a été ajoutée à la troisième ligne, multipliée par (-7).
(3) La deuxième ligne a été ajoutée à la troisième ligne, multipliée par (-1).
Suite à des transformations élémentaires, une chaîne de la forme, où λ ≠ 0 .Le système est donc incohérent.Répondre: il n'y a pas de solution.
Exemple 4 :
Décision:Nous écrivons la matrice étendue du système et, à l'aide de transformations élémentaires, nous l'amenons à une forme en escalier :

Conversions effectuées :
(une). La première ligne multipliée par 2 a été ajoutée à la deuxième ligne La première ligne multipliée par 3 a été ajoutée à la troisième ligne.
Il n'y a pas d'unité pour la deuxième étape , et la transformation (2) vise à l'obtenir.
(2). La deuxième ligne a été ajoutée à la troisième ligne, multipliée par -3.
(3). Les deuxième et troisième lignes ont été permutées (le -1 résultant a été déplacé vers la deuxième étape)
(4). La deuxième ligne a été ajoutée à la troisième ligne, multipliée par 3.
(5). Le signe des deux premières lignes a été changé (multiplié par -1), la troisième ligne a été divisée par 14.
Mouvement inverse :
(une). Ici sont les variables de base (qui sont sur les étapes), et sont des variables libres (qui n'ont pas obtenu l'étape).
(2). Nous exprimons les variables de base en termes de variables libres :
A partir de la troisième équation : .
(3). Considérez la deuxième équation :, solutions particulières :
Répondre: Décision commune : ![]()
Nombres complexes
Dans cette section, nous présenterons le concept nombre complexe, considérer algébrique, trigonométrique et afficher le formulaire nombre complexe. Nous apprendrons également à effectuer des opérations avec des nombres complexes : addition, soustraction, multiplication, division, exponentiation et extraction de racine.
Pour maîtriser les nombres complexes, vous n'avez besoin d'aucune connaissance particulière du cours de mathématiques supérieures, et le matériel est disponible même pour un écolier. Il suffit de pouvoir effectuer des opérations algébriques avec des nombres "ordinaires", et de se souvenir de la trigonométrie.
Rappelons d'abord les Nombres "ordinaires". En mathématiques, on les appelle beaucoup nombres réels et sont marqués de la lettre R, ou R (épais). Tous les nombres réels sont assis sur la droite numérique familière :

La société des nombres réels est très colorée - voici des nombres entiers et des fractions, et nombres irrationnels. Dans ce cas, chaque point de l'axe numérique correspond nécessairement à un nombre réel.
- Systèmes méquations linéaires avec n inconnue.
Résolution d'un système d'équations linéaires est un tel ensemble de nombres ( x 1 , x 2 , …, x n), en substituant dans chacune des équations du système, l'égalité correcte est obtenue.
où a ij , je = 1, …, m; j = 1, …, n sont les coefficients du système ;
b je , je = 1, …, m- membres gratuits;
X j , j = 1, …, n- inconnue.
Le système ci-dessus peut être écrit sous forme matricielle : UNE X = B,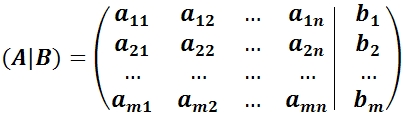


où ( UN|B) est la matrice principale du système ;
UN— matrice étendue du système ;
X— colonne des inconnues ;
B est une colonne de membres gratuits.
Si la matrice B n'est pas une matrice nulle ∅, alors ce système d'équations linéaires est dit inhomogène.
Si la matrice B= ∅, alors ce système d'équations linéaires est dit homogène. Un système homogène a toujours une solution nulle (triviale) : x 1 \u003d x 2 \u003d ..., x n \u003d 0.
Système conjoint d'équations linéaires est un système d'équations linéaires qui a une solution.
Système incohérent d'équations linéaires est un système d'équations linéaires sans solution.
Certains systèmes d'équations linéaires est un système d'équations linéaires qui a une solution unique.
Système indéfini d'équations linéaires est un système d'équations linéaires qui a un nombre infini de solutions. - Systèmes de n équations linéaires à n inconnues
Si le nombre d'inconnues est égal au nombre d'équations, alors la matrice est carrée. Le déterminant de la matrice est appelé le déterminant principal du système d'équations linéaires et est désigné par le symbole Δ.
Méthode Cramer pour résoudre des systèmes néquations linéaires avec n inconnue.
La règle de Cramer.
Si le déterminant principal du système d'équations linéaires n'est pas zéro, alors le système est cohérent et défini, et la solution unique est calculée par les formules de Cramer :
où Δ i sont les déterminants obtenus à partir du déterminant principal du système Δ en remplaçant jeème colonne à la colonne des membres libres. . - Systèmes de m équations linéaires à n inconnues
Théorème de Kronecker-Cappelli.
Pour que ce système d'équations linéaires soit cohérent, il faut et il suffit que le rang de la matrice du système soit égal au rang de la matrice étendue du système, rang(Α) = rang(Α|B).
Si un rang(Α) ≠ rang(Α|B), alors le système n'a évidemment pas de solutions.
Si rang(Α) = rang(Α|B), alors deux cas sont possibles :
1) rang(Α) = n(au nombre d'inconnues) - la solution est unique et peut être obtenue par les formules de Cramer ;
2) rang(Α)< n − il existe une infinité de solutions. - Méthode de Gauss pour résoudre des systèmes d'équations linéaires
Composons la matrice augmentée ( UN|B) du système de coefficients donné aux côtés inconnu et droit.
La méthode gaussienne ou méthode d'élimination des inconnues consiste à réduire la matrice augmentée ( UN|B) à l'aide de transformations élémentaires sur ses lignes en une forme diagonale (en une forme triangulaire supérieure). Revenant au système d'équations, toutes les inconnues sont déterminées.
Les transformations élémentaires sur les chaînes incluent les éléments suivants :
1) permuter deux lignes ;
2) multiplier une chaîne par un nombre autre que 0 ;
3) ajouter à la chaîne une autre chaîne multipliée par un nombre arbitraire ;
4) rejeter une chaîne nulle.
Une matrice étendue réduite à une forme diagonale correspond à un système linéaire équivalent à celui donné, dont la solution ne pose pas de difficultés. . - Système d'équations linéaires homogènes.
Le système homogène a la forme :
elle correspond à l'équation matricielle UNE X = 0.
1) Un système homogène est toujours cohérent, puisque r(A) = r(A|B), il existe toujours une solution nulle (0, 0, …, 0).
2) Pour qu'un système homogène ait une solution non nulle, il faut et il suffit que r = r(A)< n , ce qui équivaut à Δ = 0.
3) Si r< n , alors Δ = 0, alors il y a des inconnues libres c 1 , c 2 , …, c n-r, le système a des solutions non triviales, et il y en a une infinité.
4) Résolution générale Xà r< n peut s'écrire sous forme matricielle comme suit :
X \u003d c 1 X 1 + c 2 X 2 + ... + c n-r X n-r,
où sont les solutions X 1 , X 2 , …, X n-r forment un système fondamental de solutions.
5) Le système fondamental de solutions peut être obtenu à partir de la solution générale du système homogène : ,
,
si nous supposons séquentiellement que les valeurs des paramètres sont (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Décomposition de la solution générale en fonction du système fondamental de solutions est un enregistrement de la solution générale en tant que combinaison linéaire de solutions appartenant au système fondamental.
Théorème. Pour qu'un système d'équations homogènes linéaires ait une solution non nulle, il faut et il suffit que Δ ≠ 0.
Donc, si le déterminant est Δ ≠ 0, alors le système a une solution unique.
Si Δ ≠ 0, alors le système d'équations linéaires homogènes a une infinité de solutions.
Théorème. Pour qu'un système homogène ait une solution non nulle, il faut et il suffit que r(A)< n .
Preuve:
1) r ne peut pas être plus n(le rang de la matrice ne dépasse pas le nombre de colonnes ou de lignes) ;
2) r< n , car si r=n, alors le déterminant principal du système Δ ≠ 0, et, selon les formules de Cramer, il existe une unique solution triviale x 1 \u003d x 2 \u003d ... \u003d x n \u003d 0, ce qui contredit la condition. Moyens, r(A)< n .
Conséquence. Pour un système homogène néquations linéaires avec n inconnues a une solution non nulle, il faut et il suffit que Δ = 0.
- si le système est collaboratif ;
- si le système est consistant, alors il est défini ou indéfini (le critère de compatibilité du système est déterminé par le théorème) ;
- si le système est défini, alors comment trouver sa solution unique (on utilise la méthode de Cramer, la méthode de la matrice inverse ou la méthode de Jordan-Gauss) ;
- si le système est indéfini, alors comment décrire l'ensemble de ses solutions.
Classification des systèmes d'équations linéaires
Un système arbitraire d'équations linéaires a la forme :une 1 1 x 1 + une 1 2 x 2 + ... + une 1 n x n = b 1
une 2 1 x 1 + une 2 2 x 2 + ... + une 2 n x n = b 2
...................................................
une m 1 x 1 + une m 2 x 2 + ... + une m n X n = b m
- Systèmes d'équations linéaires inhomogènes (le nombre de variables est égal au nombre d'équations, m = n).
- Systèmes arbitraires d'équations linéaires inhomogènes (m > n ou m< n).
Définition. Deux systèmes sont dits équivalents si la solution du premier est solution du second et inversement.
Définition. Un système qui a au moins une solution est appelé découper. Un système qui n'a pas de solution est dit incohérent.
Définition. Un système avec une solution unique est appelé certain, et avoir plus d'une solution est indéfini.
Algorithme de résolution de systèmes d'équations linéaires
- Trouvez les rangs des matrices principales et étendues. S'ils ne sont pas égaux, alors, d'après le théorème de Kronecker-Capelli, le système est incohérent, et c'est là que se termine l'étude.
- Soit rang(A) = rang(B) . Nous sélectionnons la mineure de base. Dans ce cas, tous les systèmes inconnus d'équations linéaires sont divisés en deux classes. Les inconnues dont les coefficients sont inclus dans la mineure de base sont dites dépendantes, et les inconnues dont les coefficients ne sont pas inclus dans la mineure de base sont dites libres. Notez que le choix des inconnues dépendantes et libres n'est pas toujours unique.
- Nous biffons les équations du système dont les coefficients n'étaient pas inclus dans la mineure de base, car ce sont des conséquences du reste (selon le théorème de la mineure de base).
- Les termes des équations contenant des inconnues libres seront transférés à droite. On obtient ainsi un système de r équations à r inconnues, équivalentes à celle donnée, dont le déterminant est différent de zéro.
- Le système résultant est résolu de l'une des manières suivantes : la méthode de Cramer, la méthode de la matrice inverse ou la méthode de Jordan-Gauss. On trouve des relations qui expriment les variables dépendantes en termes de variables libres.
Système de m équations linéaires à n inconnues appelé un système de la forme
où aij et b je (je=1,…,m; b=1,…,n) sont des nombres connus, et x 1 ,…,x n- inconnue. Dans la notation des coefficients aij premier indice je désigne le numéro de l'équation, et la seconde j est le nombre de l'inconnue auquel se situe ce coefficient.
Les coefficients des inconnues seront écrits sous forme de matrice  , que nous appellerons matrice système.
, que nous appellerons matrice système.
Les nombres à droite des équations b 1 ,…,b m appelé membres gratuits.
Agrégat n Nombres c 1 ,…,c n appelé décision de ce système, si chaque équation du système devient une égalité après y avoir substitué des nombres c 1 ,…,c n au lieu des inconnues correspondantes x 1 ,…,x n.
Notre tâche sera de trouver des solutions au système. Dans ce cas, trois situations peuvent se présenter :
Un système d'équations linéaires qui a au moins une solution est appelé découper. Sinon, c'est-à-dire si le système n'a pas de solutions, alors on l'appelle incompatible.
Envisager des moyens de trouver des solutions au système.
MÉTHODE MATRICIELLE POUR LA RÉSOLUTION DE SYSTÈMES D'ÉQUATIONS LINÉAIRES
Les matrices permettent d'écrire brièvement un système d'équations linéaires. Soit un système de 3 équations à trois inconnues :

Considérons la matrice du système  et les colonnes matricielles des membres inconnus et libres
et les colonnes matricielles des membres inconnus et libres 
Trouvons le produit

ceux. par suite du produit, on obtient les membres gauches des équations de ce système. Puis en utilisant la définition de l'égalité matricielle ce système peut s'écrire sous la forme
 ou plus court UN∙X=B.
ou plus court UN∙X=B.
Ici les matrices UN et B sont connus, et la matrice X inconnue. Elle doit être trouvée, parce que. ses éléments sont la solution de ce système. Cette équation s'appelle équation matricielle.
Soit le déterminant de la matrice différent de zéro | UN| ≠ 0. Ensuite, l'équation matricielle est résolue comme suit. Multipliez les deux côtés de l'équation de gauche par la matrice A-1, l'inverse de la matrice UN: . Dans la mesure où A -1 A = E et E∙X=X, on obtient alors la solution de l'équation matricielle sous la forme X = A -1 B .
Notez que puisque la matrice inverse ne peut être trouvée que pour les matrices carrées, la méthode matricielle ne peut résoudre que les systèmes dans lesquels le nombre d'équations est égal au nombre d'inconnues. Cependant, la notation matricielle du système est également possible dans le cas où le nombre d'équations n'est pas égal au nombre d'inconnues, alors la matrice UN n'est pas carré et il est donc impossible de trouver une solution au système sous la forme X = A -1 B.
Exemples. Résoudre des systèmes d'équations.

RÈGLE DE CRAMER
Considérons un système de 3 équations linéaires à trois inconnues :
Déterminant de troisième ordre correspondant à la matrice du système, c'est-à-dire composé de coefficients à inconnues,

appelé déterminant du système.
On compose trois autres déterminants comme suit : on remplace successivement 1, 2 et 3 colonnes du déterminant D par une colonne de termes libres

On peut alors prouver le résultat suivant.
Théorème (règle de Cramer). Si le déterminant du système est Δ ≠ 0, alors le système considéré a une et une seule solution, et
![]()
Preuve. Considérons donc un système de 3 équations à trois inconnues. Multiplier la 1ère équation du système par le complément algébrique Un 11élément un 11, 2ème équation - sur A21 et 3ème - le Un 31:

Ajoutons ces équations :
Considérez chacune des parenthèses et le côté droit de cette équation. Par le théorème sur le développement du déterminant en fonction des éléments de la 1ère colonne
De même, on peut montrer que et .
Enfin, il est facile de voir que 
Ainsi, on obtient l'égalité : .
Ainsi, .
Les égalités et se dérivent de la même manière, d'où l'assertion du théorème.
Ainsi, on note que si le déterminant du système est Δ ≠ 0, alors le système a une solution unique et vice versa. Si le déterminant du système est égal à zéro, alors le système a soit un ensemble infini de solutions, soit aucune solution, c'est-à-dire incompatible.
Exemples. Résoudre un système d'équations

MÉTHODE DE GAUSS
Les méthodes précédemment considérées ne peuvent être utilisées que pour résoudre les systèmes dans lesquels le nombre d'équations coïncide avec le nombre d'inconnues et le déterminant du système doit être différent de zéro. La méthode gaussienne est plus universelle et convient aux systèmes avec n'importe quel nombre d'équations. Elle consiste en l'élimination successive des inconnues des équations du système.
Considérons à nouveau un système de trois équations à trois inconnues :
 .
.
Nous laissons la première équation inchangée, et de la 2ème et 3ème nous excluons les termes contenant x1. Pour ce faire, nous divisons la deuxième équation par un 21 et multiplier par - un 11 puis additionner avec la 1ère équation. De même, nous divisons la troisième équation en un 31 et multiplier par - un 11 puis ajoutez-le au premier. En conséquence, le système original prendra la forme :

Maintenant, de la dernière équation, nous éliminons le terme contenant x2. Pour ce faire, divisez la troisième équation par , multipliez par et ajoutez-la à la seconde. On aura alors un système d'équations :

Par conséquent, à partir de la dernière équation, il est facile de trouver x3, puis de la 2ème équation x2 et enfin à partir du 1er - x1.
Lors de l'utilisation de la méthode gaussienne, les équations peuvent être interchangées si nécessaire.
Souvent au lieu d'écrire nouveau système les équations se limitent à écrire la matrice étendue du système :

puis l'amener à une forme triangulaire ou diagonale en utilisant des transformations élémentaires.
Pour transformations élémentaires les matrices incluent les transformations suivantes :
- permutation de lignes ou de colonnes ;
- multiplier une chaîne par un nombre non nul ;
- ajouter à une ligne d'autres lignes.
Exemples: Résoudre des systèmes d'équations à l'aide de la méthode de Gauss.

Ainsi, le système a un nombre infini de solutions.
Les systèmes d'équations sont largement utilisés dans l'industrie économique dans la modélisation mathématique de divers processus. Par exemple, lors de la résolution de problèmes de gestion et de planification de la production, d'itinéraires logistiques (problème de transport) ou de placement d'équipements.
Les systèmes d'équations sont utilisés non seulement dans le domaine des mathématiques, mais aussi en physique, en chimie et en biologie, lors de la résolution de problèmes de recherche de la taille de la population.
Un système d'équations linéaires est un terme pour deux ou plusieurs équations à plusieurs variables pour lesquelles il est nécessaire de trouver une solution commune. Une telle suite de nombres pour laquelle toutes les équations deviennent de vraies égalités ou prouvent que la suite n'existe pas.
Équation linéaire
Les équations de la forme ax+by=c sont dites linéaires. Les désignations x, y sont les inconnues dont il faut trouver la valeur, b, a sont les coefficients des variables, c est le terme libre de l'équation.
Résoudre l'équation en traçant son graphique ressemblera à une ligne droite, dont tous les points sont la solution du polynôme.
Types de systèmes d'équations linéaires
Les plus simples sont des exemples de systèmes d'équations linéaires à deux variables X et Y.
F1(x, y) = 0 et F2(x, y) = 0, où F1,2 sont des fonctions et (x, y) sont des variables de fonction.
Résoudre un système d'équations - cela signifie trouver de telles valeurs (x, y) auxquelles le système se transforme en une véritable égalité ou établir que valeurs appropriées x et y n'existent pas.
Une paire de valeurs (x, y), écrites sous forme de coordonnées ponctuelles, est appelée solution d'un système d'équations linéaires.
Si les systèmes ont une solution commune ou s'il n'y a pas de solution, ils sont dits équivalents.
Les systèmes homogènes d'équations linéaires sont des systèmes dont le côté droit est égal à zéro. Si la partie droite après le signe "égal" a une valeur ou est exprimée par une fonction, un tel système n'est pas homogène.
Le nombre de variables peut être bien supérieur à deux, alors nous devrions parler d'un exemple de système d'équations linéaires à trois variables ou plus.
Face aux systèmes, les écoliers supposent que le nombre d'équations doit nécessairement coïncider avec le nombre d'inconnues, mais il n'en est rien. Le nombre d'équations dans le système ne dépend pas des variables, il peut y en avoir un nombre arbitrairement grand.
Méthodes simples et complexes pour résoudre des systèmes d'équations
Il n'y a pas de méthode analytique générale pour résoudre de tels systèmes, toutes les méthodes sont basées sur des solutions numériques. Le cours de mathématiques de l'école décrit en détail des méthodes telles que la permutation, l'addition algébrique, la substitution, ainsi que la méthode graphique et matricielle, la solution par la méthode de Gauss.
La tâche principale dans l'enseignement des méthodes de résolution est d'apprendre à analyser correctement le système et à trouver algorithme optimal solutions pour chaque exemple. L'essentiel n'est pas de mémoriser un système de règles et d'actions pour chaque méthode, mais de comprendre les principes d'application d'une méthode particulière.
Résolution d'exemples de systèmes d'équations linéaires de la 7ème classe du programme école secondaire assez simple et bien expliqué. Dans tout manuel de mathématiques, cette section reçoit suffisamment d'attention. La résolution d'exemples de systèmes d'équations linéaires par la méthode de Gauss et Cramer est étudiée plus en détail dans les premiers cours des établissements d'enseignement supérieur.
Résolution de systèmes par la méthode de substitution
Les actions de la méthode de substitution visent à exprimer la valeur d'une variable à travers la seconde. L'expression est substituée dans l'équation restante, puis elle est réduite à une seule forme variable. L'action est répétée en fonction du nombre d'inconnues dans le système
Donnons un exemple d'un système d'équations linéaires de la 7ème classe par la méthode de substitution :

Comme on peut le voir dans l'exemple, la variable x a été exprimée par F(X) = 7 + Y. L'expression résultante, substituée dans la 2ème équation du système à la place de X, a permis d'obtenir une variable Y dans la 2ème équation . La solution de cet exemple ne pose pas de difficultés et permet d'obtenir la valeur Y. La dernière étape consiste à vérifier les valeurs obtenues.
Il n'est pas toujours possible de résoudre un exemple de système d'équations linéaires par substitution. Les équations peuvent être complexes et l'expression de la variable en fonction de la seconde inconnue sera trop lourde pour des calculs ultérieurs. Lorsqu'il y a plus de 3 inconnues dans le système, la solution de substitution est également impraticable.
Solution d'un exemple de système d'équations linéaires inhomogènes :

Solution utilisant l'addition algébrique
Lors de la recherche d'une solution à des systèmes par la méthode d'addition, l'addition terme à terme et la multiplication d'équations par divers numéros. Le but ultime des opérations mathématiques est une équation à une variable.

Les applications de cette méthode nécessitent de la pratique et de l'observation. Il n'est pas facile de résoudre un système d'équations linéaires en utilisant la méthode d'addition avec le nombre de variables 3 ou plus. L'addition algébrique est utile lorsque les équations contiennent des fractions et des nombres décimaux.
Algorithme d'action de solution :
- Multipliez les deux côtés de l'équation par un certain nombre. Par conséquent opération arithmétique l'un des coefficients de la variable doit devenir égal à 1.
- Additionnez l'expression résultante terme par terme et trouvez l'une des inconnues.
- Remplacez la valeur résultante dans la 2e équation du système pour trouver la variable restante.
Méthode de résolution en introduisant une nouvelle variable
Une nouvelle variable peut être introduite si le système doit trouver une solution pour pas plus de deux équations, le nombre d'inconnues ne doit pas non plus être supérieur à deux.
La méthode est utilisée pour simplifier une des équations en introduisant une nouvelle variable. La nouvelle équation est résolue par rapport à l'inconnue saisie et la valeur résultante est utilisée pour déterminer la variable d'origine.
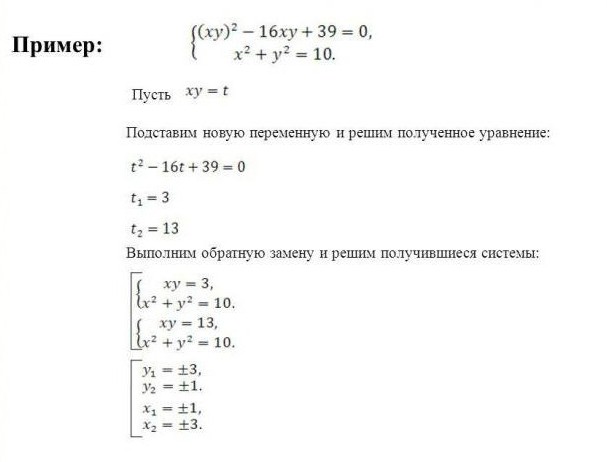
L'exemple montre qu'en introduisant une nouvelle variable t, il a été possible de réduire la 1ère équation du système au standard trinôme carré. Vous pouvez résoudre un polynôme en trouvant le discriminant.
Il faut trouver la valeur du discriminant par formule bien connue: D = b2 - 4*a*c, où D est le discriminant recherché, b, a, c sont les multiplicateurs du polynôme. Dans l'exemple donné, a=1, b=16, c=39, donc D=100. Si le discriminant est supérieur à zéro, alors il y a deux solutions : t = -b±√D / 2*a, si le discriminant est inférieur à zéro, alors il n'y a qu'une solution : x= -b / 2*a.
La solution pour les systèmes résultants est trouvée par la méthode d'addition.
Une méthode visuelle pour résoudre des systèmes
Convient aux systèmes à 3 équations. La méthode consiste à tracer des graphiques de chaque équation incluse dans le système sur l'axe des coordonnées. Les coordonnées des points d'intersection des courbes seront la solution générale du système.
La méthode graphique a un certain nombre de nuances. Considérez plusieurs exemples de résolution de systèmes d'équations linéaires de manière visuelle.

Comme on peut le voir sur l'exemple, deux points ont été construits pour chaque ligne, les valeurs de la variable x ont été choisies arbitrairement : 0 et 3. Sur la base des valeurs de x, les valeurs de y ont été trouvées : 3 et 0. Les points de coordonnées (0, 3) et (3, 0) ont été marqués sur le graphique et reliés par une ligne.
Les étapes doivent être répétées pour la deuxième équation. Le point d'intersection des droites est la solution du système.
Dans l'exemple suivant, il s'agit de trouver une solution graphique au système d'équations linéaires : 0,5x-y+2=0 et 0,5x-y-1=0.

Comme on peut le voir dans l'exemple, le système n'a pas de solution, car les graphiques sont parallèles et ne se coupent pas sur toute leur longueur.

Les systèmes des exemples 2 et 3 sont similaires, mais une fois construits, il devient évident que leurs solutions sont différentes. Il faut rappeler qu'il n'est pas toujours possible de dire si le système a une solution ou non, il faut toujours construire un graphe.
Matrix et ses variétés
Les matrices sont utilisées pour écrire brièvement un système d'équations linéaires. Une matrice est un type spécial de tableau rempli de nombres. n*m a n - lignes et m - colonnes.
Une matrice est carrée lorsque le nombre de colonnes et de lignes est égal. Une matrice-vecteur est une matrice à une seule colonne avec un nombre infiniment possible de lignes. Une matrice avec des unités le long de l'une des diagonales et d'autres éléments nuls est appelée identité.
Une matrice inverse est une telle matrice, lorsqu'elle est multipliée par laquelle l'originale se transforme en une unité, une telle matrice n'existe que pour la carrée d'origine.
Règles de transformation d'un système d'équations en matrice
En ce qui concerne les systèmes d'équations, les coefficients et les membres libres des équations sont écrits sous forme de nombres de la matrice, une équation est une ligne de la matrice.
Une ligne de matrice est dite non nulle si au moins un élément de la ligne n'est pas égal à zéro. Par conséquent, si dans l'une des équations le nombre de variables diffère, il est nécessaire d'entrer zéro à la place de l'inconnue manquante.
Les colonnes de la matrice doivent strictement correspondre aux variables. Cela signifie que les coefficients de la variable x ne peuvent être écrits que dans une colonne, par exemple la première, le coefficient de l'inconnue y - seulement dans la seconde.
Lors de la multiplication d'une matrice, tous les éléments de la matrice sont successivement multipliés par un nombre.
Options pour trouver la matrice inverse
La formule pour trouver la matrice inverse est assez simple : K -1 = 1 / |K|, où K -1 est la matrice inverse et |K| - déterminant matriciel. |K| ne doit pas être égal à zéro, alors le système a une solution.
Le déterminant se calcule facilement pour une matrice deux par deux, il suffit de multiplier les éléments en diagonale les uns par les autres. Pour l'option "trois par trois", il existe une formule |K|=a 1 b 2 c 3 + a 1 b 3 c 2 + a 3 b 1 c 2 + a 2 b 3 c 1 + a 2 b 1 c 3 + une 3 b 2 c 1 . Vous pouvez utiliser la formule ou vous rappeler que vous devez prendre un élément de chaque ligne et de chaque colonne afin que les numéros de colonne et de ligne des éléments ne se répètent pas dans le produit.
Résolution d'exemples de systèmes d'équations linéaires par la méthode matricielle
La méthode matricielle de recherche de solution permet de réduire les notations fastidieuses lors de la résolution de systèmes avec grande quantité variables et équations.

Dans l'exemple, a nm sont les coefficients des équations, la matrice est un vecteur x n sont les variables, et b n sont les termes libres.


Résolution de systèmes par la méthode de Gauss
En mathématiques supérieures, la méthode de Gauss est étudiée avec la méthode de Cramer, et le processus de recherche d'une solution aux systèmes s'appelle la méthode de résolution de Gauss-Cramer. Ces méthodes sont utilisées pour trouver les variables de systèmes avec un grand nombre d'équations linéaires.
La méthode gaussienne est très similaire aux solutions de substitution et d'addition algébrique, mais elle est plus systématique. Dans le cours scolaire, la solution gaussienne est utilisée pour les systèmes de 3 et 4 équations. Le but de la méthode est d'amener le système à la forme d'un trapèze inversé. Par transformations et substitutions algébriques, la valeur d'une variable se retrouve dans une des équations du système. La deuxième équation est une expression à 2 inconnues, et 3 et 4 - à 3 et 4 variables, respectivement.
Après avoir amené le système à la forme décrite, la solution supplémentaire est réduite à la substitution séquentielle de variables connues dans les équations du système.
Dans les manuels scolaires de la 7e année, un exemple de solution gaussienne est décrit comme suit :

Comme on peut le voir à partir de l'exemple, à l'étape (3) deux équations ont été obtenues 3x 3 -2x 4 =11 et 3x 3 +2x 4 =7. La solution de l'une des équations vous permettra de trouver l'une des variables x n.

Le théorème 5, qui est mentionné dans le texte, dit que si l'une des équations du système est remplacée par une équation équivalente, alors le système résultant sera également équivalent à celui d'origine.
La méthode de Gauss est difficile à comprendre pour les étudiants lycée, mais est l'un des plus façons intéressantes développer l'ingéniosité des enfants inscrits au programme d'études supérieures en mathématiques et en physique.
Pour faciliter l'enregistrement des calculs, il est d'usage de procéder comme suit :

Les coefficients d'équation et les termes libres sont écrits sous la forme d'une matrice, où chaque ligne de la matrice correspond à l'une des équations du système. sépare le côté gauche de l'équation du côté droit. Les chiffres romains indiquent le nombre d'équations dans le système.
Ils écrivent d'abord la matrice avec laquelle travailler, puis toutes les actions effectuées avec l'une des lignes. La matrice résultante est écrite après le signe "flèche" et continue à effectuer les opérations algébriques nécessaires jusqu'à ce que le résultat soit atteint.
En conséquence, une matrice doit être obtenue dans laquelle l'une des diagonales est 1 et tous les autres coefficients sont égaux à zéro, c'est-à-dire que la matrice est réduite à une forme unique. Il ne faut pas oublier de faire des calculs avec les nombres des deux côtés de l'équation.
Cette notation est moins lourde et permet de ne pas se laisser distraire en listant de nombreuses inconnues.
L'application gratuite de toute méthode de solution nécessitera des soins et une certaine expérience. Toutes les méthodes ne sont pas appliquées. Certaines façons de trouver des solutions sont plus préférables dans un domaine particulier de l'activité humaine, tandis que d'autres existent dans un but d'apprentissage.
Nous recommandons également
 De quelle SIM avez-vous besoin pour iPhone ?
De quelle SIM avez-vous besoin pour iPhone ?
 Comment réapprovisionner votre compte Webmoney depuis votre téléphone
Comment réapprovisionner votre compte Webmoney depuis votre téléphone
 Toutes les façons de définir la sonnerie sur iPhone
Toutes les façons de définir la sonnerie sur iPhone
 Adresses et numéros de téléphone au Japon Comment téléphoner du Japon vers la Russie
Adresses et numéros de téléphone au Japon Comment téléphoner du Japon vers la Russie
 Télécommande pour un téléviseur dans un téléphone portable : comment contrôler un téléviseur à l'aide d'un androïde ?
Télécommande pour un téléviseur dans un téléphone portable : comment contrôler un téléviseur à l'aide d'un androïde ?
 Films vinyle en fibre de carbone
Films vinyle en fibre de carbone